Разработка и исследование алгоритмического обеспечения …
11
ной скорости;
M
B
— матрица положения базиса ССК относительно
корректируемого базиса M;
3 3
×
O
,
6 3
×
O
— нулевые матрицы.
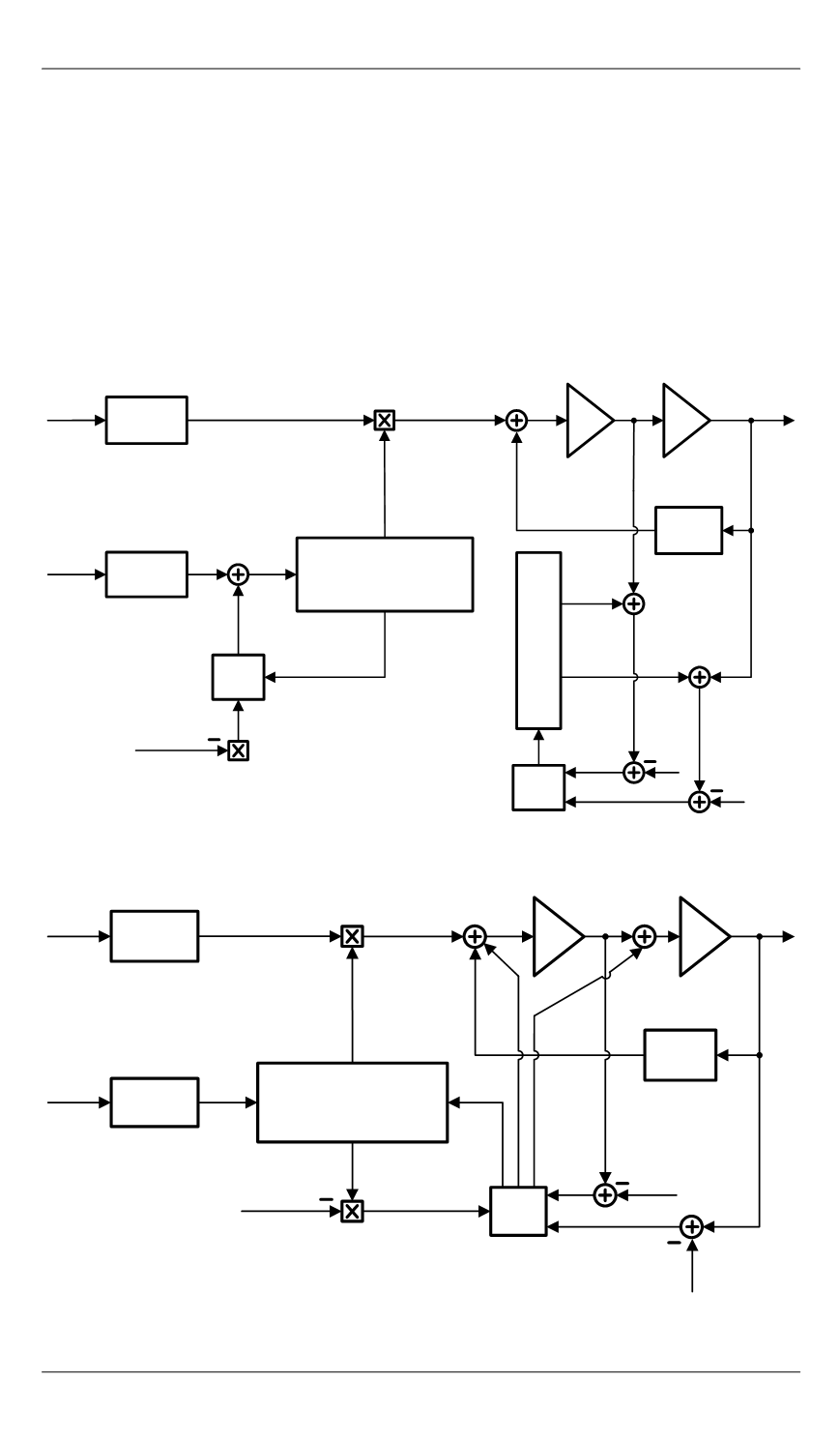
На рис. 8 схема с фильтром Калмана состоит из двух независи-
мых частей: одна из них уже рассмотрена выше для углового движе-
ния, а другая часть относится к движению центра масс. Возможны и
дальнейшие модификации схем, например так, как показано на
рис. 9, где калмановская фильтрация выполняется непосредственно
на алгоритме обработки.
B
a
γ
B
ˆ
γ
a
v
ˆ
γ
a
r
ˆ
∫
∫
B
a
ˆ
γ
a
ˆ
B
B
γ
ω
ˆ
( )
γ
a
rg
ВИУС
ВИЛУ
Кинематические
уравнения
углового движения
Линеаризованное
описание
K
f
K
f
γ
ref
r
γ
ref
v
γ
a
r
ˆ
ˆ
γ
a
v
ˆ
ˆ
B
B
γ
ω
ЗД
B B
=
γ
Рис. 8.
Блок-схема корректируемого алгоритма навигации
B
a
γ
B
ˆ
γ
a
v
ˆ
γ
a
r
ˆ
∫
∫
B
a
ˆ
γ
a
ˆ
B
B
γ
ω
ˆ
( )
γ
a
rg
ВИУС
ВИЛУ
Кинематические
уравнения
углового движения
K
f
γ
ref
r
γ
ref
v
B
B
γ
ω
ЗД
B B
=
γ
Рис. 9.
Блок-схема корректируемого алгоритма навигации


