Разработка и исследование алгоритмического обеспечения …
21
t
, с
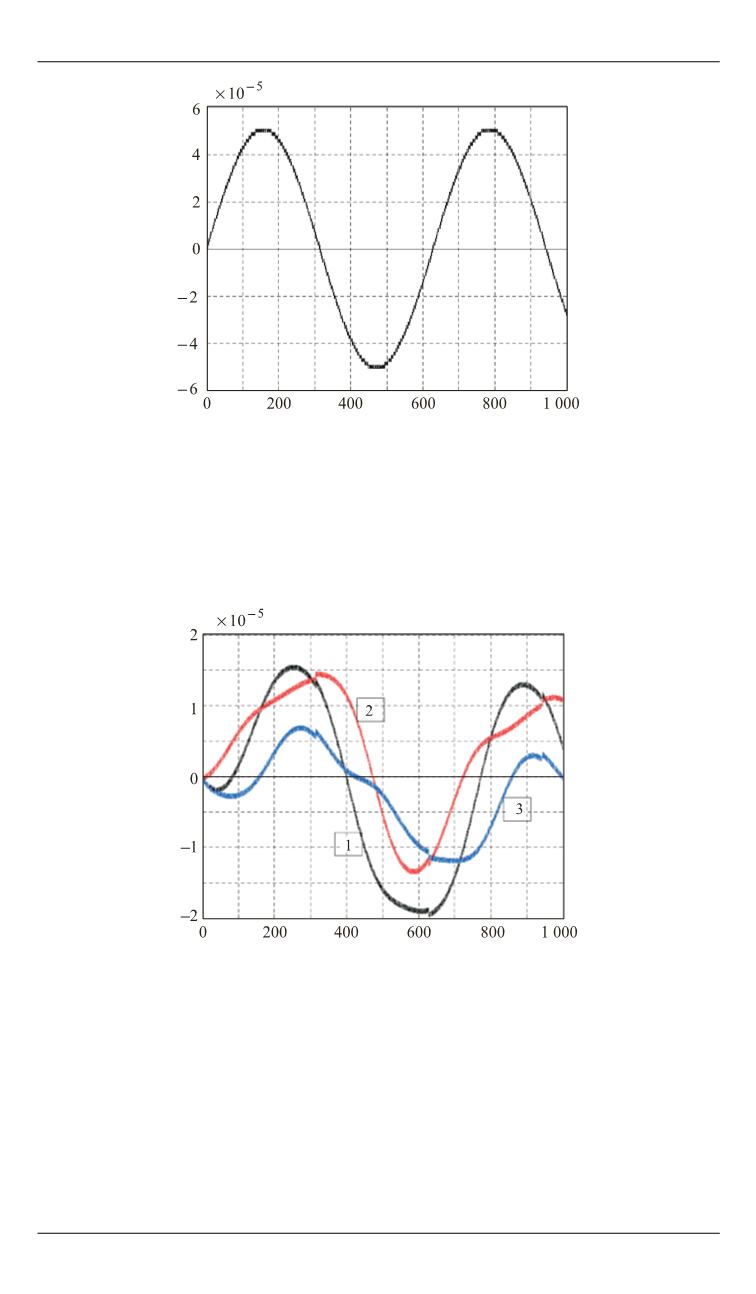
Рис. 22.
Угловая скорость, измеренная ВИУС
по одной из осей (с
–1
)
Ниже приведен график изменения погрешности при наличии
обратной связи с параметром
K
кор
= 0,01.
t
, с
Рис. 23.
Погрешность в виде кватерниона
vect
(
δ
B
)
по осям ССК (рад)
Заключение.
1. Разработана общая структура системы ориентации и
навигации, в рамках которой можно сформировать различные вари-
анты режимов управляемого углового движения и получить инфор-
мацию о движении центра масс.


