Е.С. Лобусов, А.В. Фомичев
18
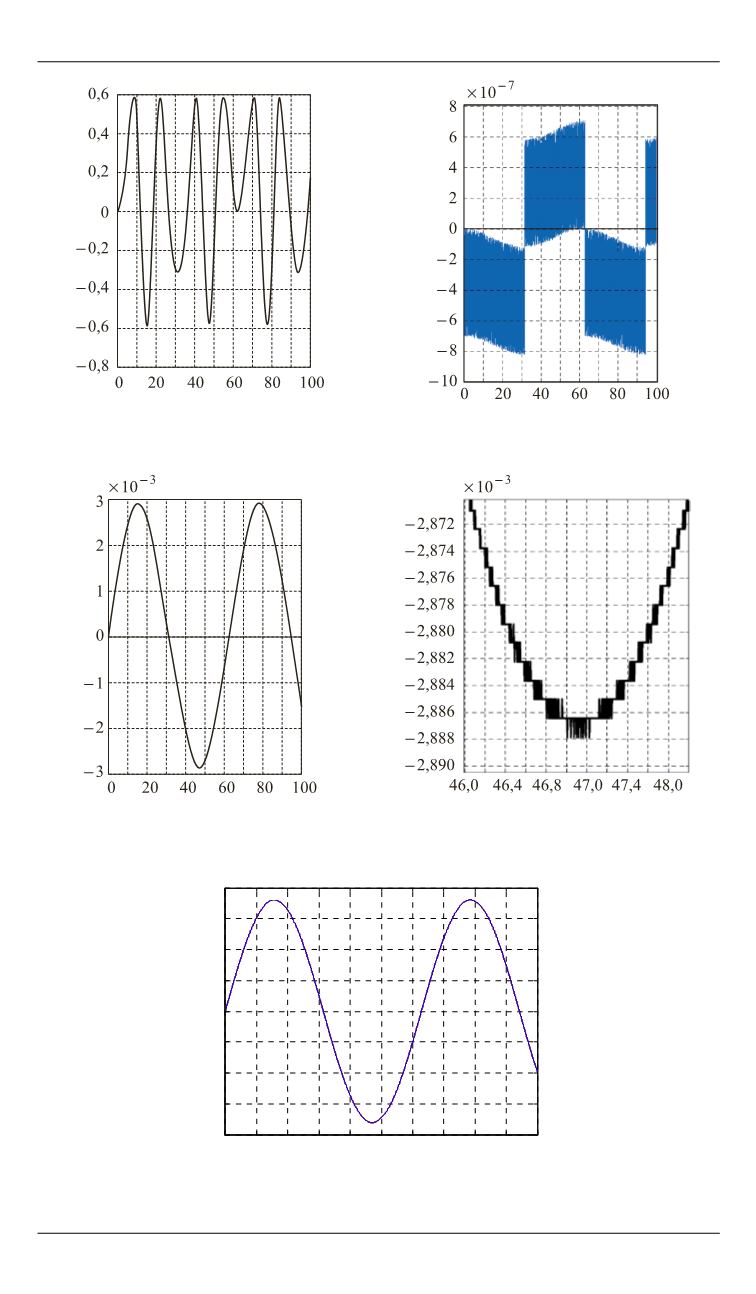
Рис. 12.
Компоненты векторной
части кватерниона эталона
Рис. 13.
Погрешность
интегрирования
Рис. 14.
Измеряемая угловая
скорость
Рис. 15.
Измеренная ВИУС угловая
скорость (увеличенный масштаб)
0 10 20 30 40 50 60 70 80 90 100
-8
-6
-4
-2
0
2
4
6
8
x 10
-4
t
, с
Рис. 16.
Погрешность интегрирования


