3
КА
М
ВИУС
КИН
r
v
Закон
регулирования
угловой
скоростью
Коррекция
ВИЛУ
Идеальная
КИН
Закон
регулирования
ориентацией
ЗД
∫
∫
g
(
r
)
ДМВ
Оценка
орбитальной
скорости
Орбитальное
движение
Приемник СНС
1
2
3
4
5
6
7
ω
орб
ω
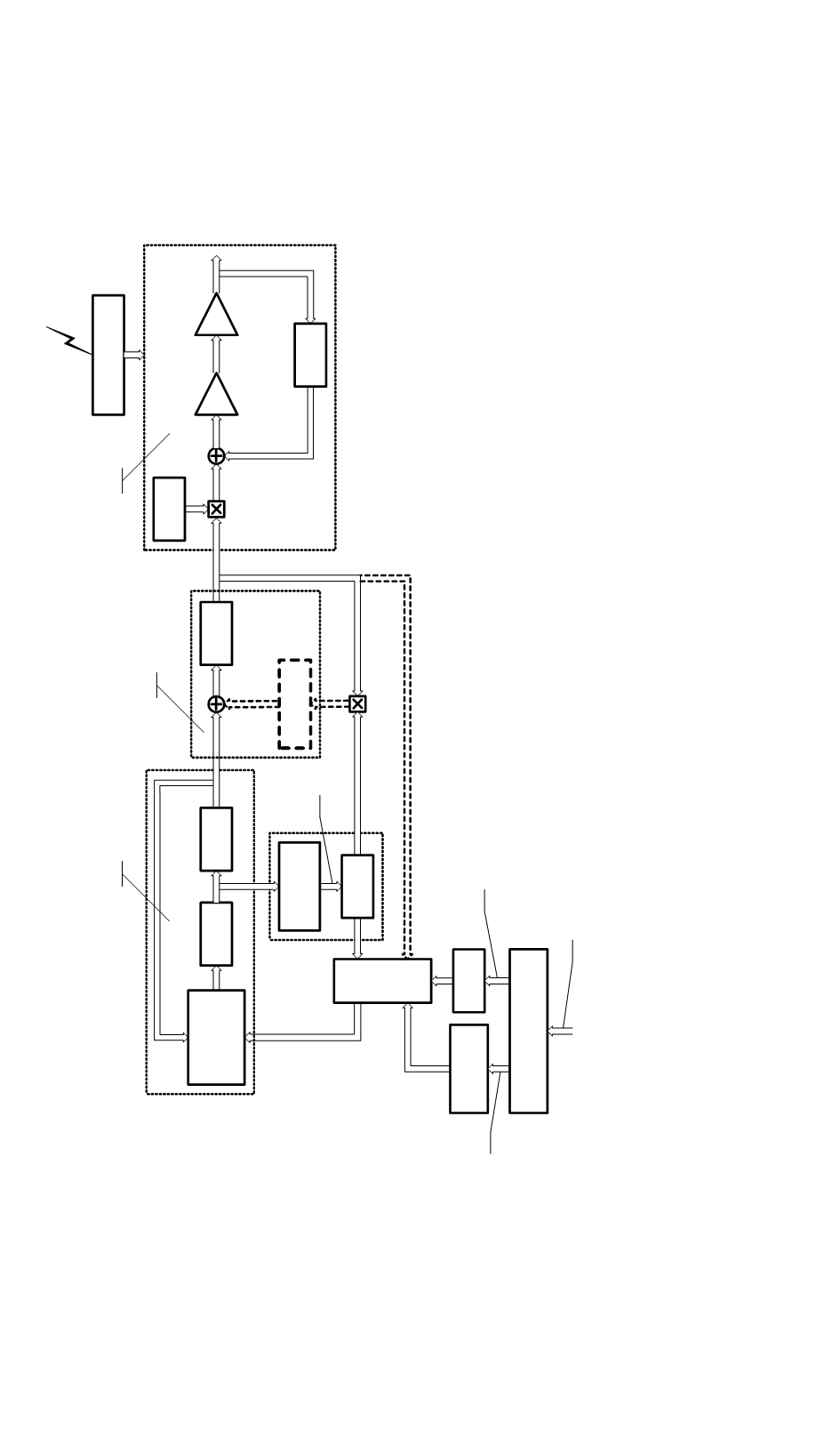
Рис. 1.
Блок-схема бесплатформенной системы управления (ориентацией) МКА:
1 — динамический контур; 2 — корректируемый контур угловой кинематики; 3 — бесплатформенная инерциальная навигационная система
(БИНС); 4 — угловое положение связанной системы координат (ССК) относительно инерциальной системы координат (ИСК); 5 — угловое
положение ССК относительно орбитальной системы координат (ОСК); 6 — орбитальная угловая скорость; 7 — задание параметров орби-
тального движения; ВИУС — векторный измеритель угловой скорости; ВИЛУ — векторный измеритель линейного ускорения; ДМВ —
датчик местной вертикали; КИН — кинематические уравнения углового движения (реализуемые); КА — космический аппарат; ЗД —
звездный датчик; СНС — спутниковая навигационная система;
v
— вектор линейной скорости;
r
— радиус-вектор


