Разработка и исследование алгоритмического обеспечения …
19
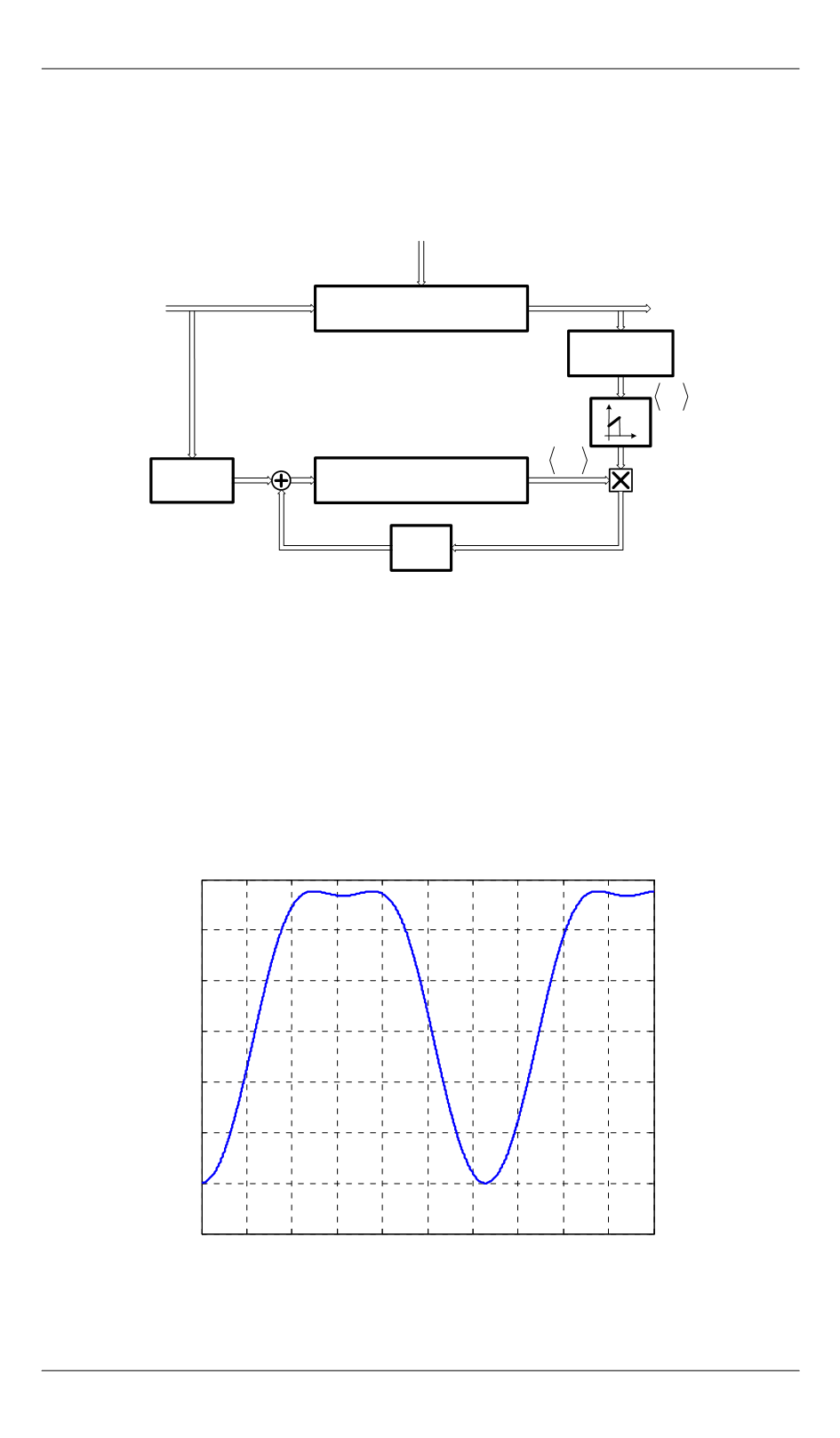
Исследование контура коррекции
реализовано в вычислитель-
ной среде
Matlab
. На рис. 17 приведена схема отработки контура
коррекции. По сравнению с рис. 3, здесь добавлена имитация внеш-
него движения КА (эталон) совместно с моделями измерителей ЗД и
ВИУС.
S
B
M
B
0
S
B
От БИНС
Β
ω
ˆ
Начальные
условия
Модель
ВИУС
Алгоритмы ориентации
БИНС
Эталонная ориентация
Β
ω
S
B
K
кор
Модель ЗД
Экстраполятор
Рис. 17.
Блок-схема для исследования контура коррекции
Условия моделирования
Коэффициенты:
k
вр
= 0,0175, ω
вр
= 0,01 с
–1
,
K
кор
= 0,01.
ВИУС имеет импульсный выходной сигнал (см. рис. 15).
Дрейфы по осям (с
–1
): [
−0,0000001; 0,0000001; −0,0000001]
Т
.
Обратная связь отсутствует:
K
кор
= 0.
Результаты моделирования
0 100 200 300 400 500 600 700 800 900 1000
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t
, с
Рис. 18.
Изменение одной из векторных компонент
кватерниона показаний ЗД (эталон)


