Е.С. Лобусов, А.В. Фомичев
20
0 100 200 300 400 500 600 700 800 900 1000
-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
x 10
-5
1
2
3
t
, с
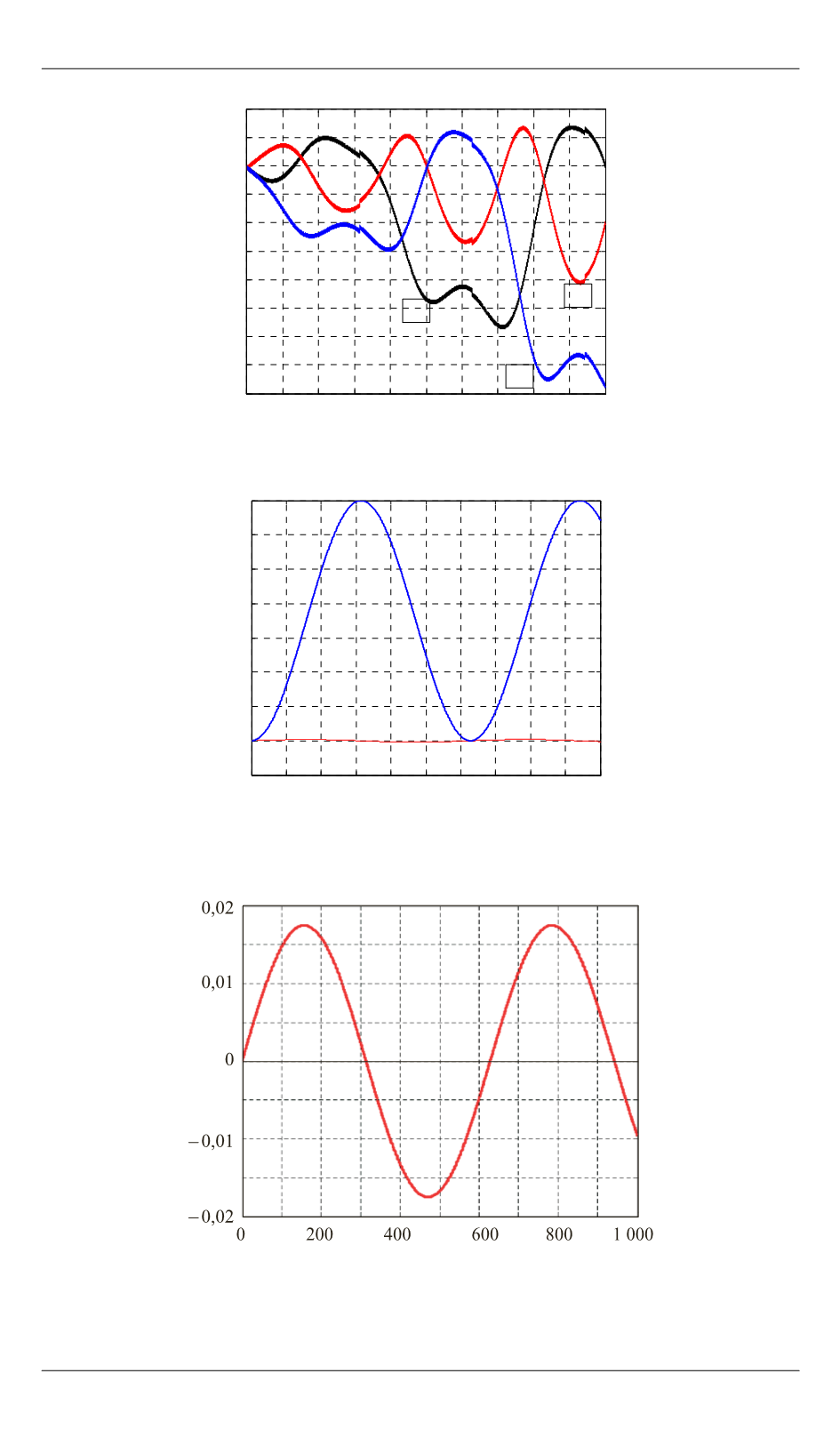
Рис. 19.
Кватернионная погрешность
vect
(
δ
B
) по осям ССК (рад)
0 100 200 300 400 500 600 700 800 900 1000
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
t
, с
Рис. 20.
Изменение угла поворота
θ
(
t
) относительно
оси вращения (рад)
t
, с
Рис. 21.
Изменение угловой скорости вращения
d
θ
/
dt
относительно оси (с
–1
)


