9
Математическое моделирование движения космического аппарата
Тем самым, при
t
= 0 координаты
x
1
,
x
2
,
x
3
и скорости
1
2
3
,
,
dx dx dx
dt dt dt
оказываются однозначными функциями четырех параметров:
A
,
B
, φ
1
,
φ
2
. Переходя к невращающейся СК, определим зависимости элемен-
тов геоцентрической орбиты
, , , , ,
v
i r
π
π
ω Ω τ
от этих параметров, вы-
делим траектории одноимпульсного перелета условием на расстояние
перицентра:
*
E
,
r R h r
π
π
= + =
где
R
E
— экваториальный радиус Земли;
h
— заданная высота орбиты
ИСЗ.
Таким образом, множество орбит перелета определяется зависимо-
стями элементов геоцентрической орбиты
, , , ,
v
i r
π
π
ω Ω
и τ от параме-
тров
A
,
B
, φ
1
и φ
2
гало-орбиты при условии, что расстояние перицентра
r
π
равно заданной величине. При фиксированных
A
и
B
в плоскости φ
1
,
φ
2
строится изолиния:
(
)
*
1 2
,
.
r
r
π
π
ϕ ϕ =
Рассмотрим алгоритм вычисления
r
π
по заданным фазам φ
1
и φ
2
.
Сначала вычисляется вектор состояния КА в инерциальной СК, полу-
ченной фиксацией осей вращающейся СК на фиксированный момент
времени
t
в зависимости от параметров:
A
,
B
, φ
1
и φ
2
. Введем следую-
щие обозначения:
(
)
T
1 2 3 1 2 3
, , , , ,
ξ ξ ξ ξ ξ ξ
— вектор состояния КА в момент времени
t
= 0
во вращающейся СК с центром в
L
2
;
(
)
T
1 2 3 1 2 3
, , , , ,
x x x x x x
— вектор состояния КА в момент времени
t
= 0
в невращающейся геоцентрической эклиптической СК
Ox
1
x
2
x
3
, ось
Ox
1
которой направлена на Солнце в момент времени
t
0
.
Координаты и компоненты вектора скорости КА во вращающейся
СК с центром в
L
2
вычисляются по формулам
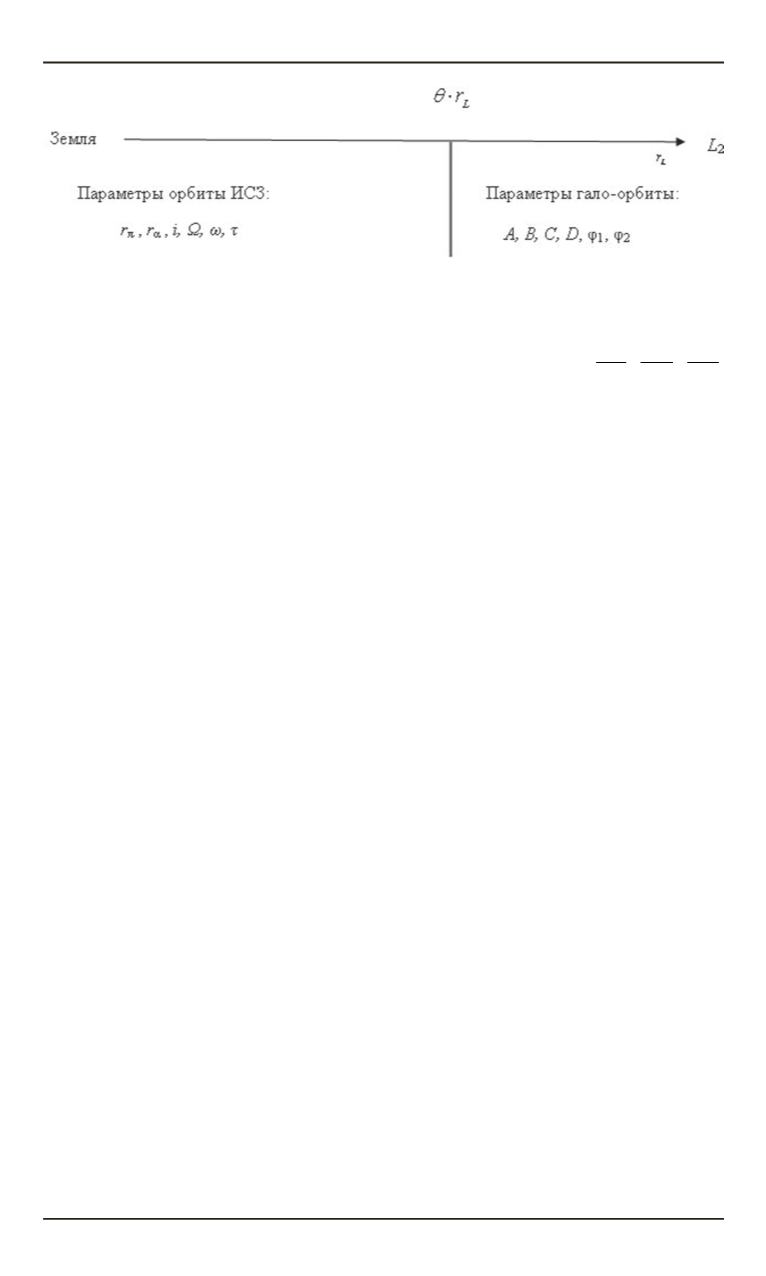
Рис. 4.
Переход от параметров геоцентрической орбиты перелетной траекто-
рии к параметрам гало-орбиты


