














 9 / 16
9 / 16

Моделирование взаимодействия мобильного робота и опорного основания…
Инженерный журнал: наука и инновации
# 12·2016 9
3) с помощью алгоритма GJK определяют наличие пересечения с
многогранниками;
4) в случае пересечения алгоритмом EPA вычисляют вектор про-
никновения;
5) определение точек контакта алгоритмом обрезки;
6) вычисление силы и момента, действующих на тело, и их ввод в
модель.
В целом реализация модели на этом этапе обладает высокой ста-
бильностью вычислений, однако содержит решения, снижающие
производительность.
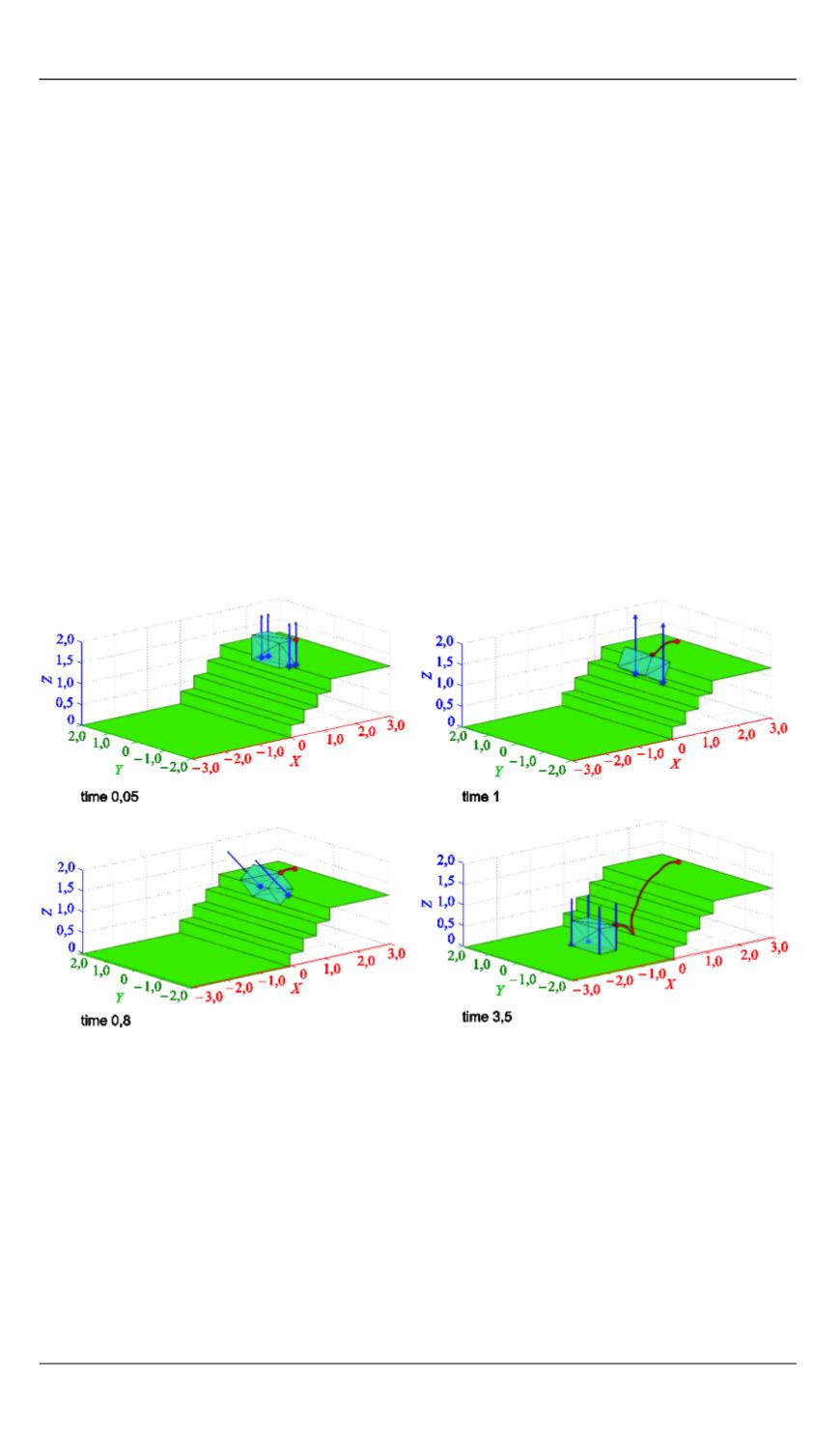
Для качественной проверки адекватности разработанной имита-
ционной компьютерной модели была составлена механическая си-
стема (рис. 7). Тело в форме параллелепипеда скатывается вниз по
ступеням, испытывая различные виды контакта (грани, плоскости,
вершины). На рис. 7 обозначены характерные положения, точки, траек-
тория и векторы сил контакта.
Рис. 7.
Работа модели «ящик на ступенях»
Разработанная модель демонстрирует правдоподобное поведение
объектов на трассах сложного профиля, что дает возможность перей-
ти к моделированию транспортной машины.
Моделирование транспортной машины с колесно-шагающим
движителем.
Интенсивное развитие робототехники вызывает у ис-
следователей интерес к необычным движителям. Так, в некоторых
условиях (например, в пределах города) может быть эффективен ко-
лесно-шагающий трехкатковый движитель. Несмотря на существова-