














 7 / 16
7 / 16

Моделирование взаимодействия мобильного робота и опорного основания…
Инженерный журнал: наука и инновации
# 12·2016 7
б
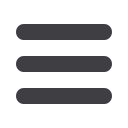
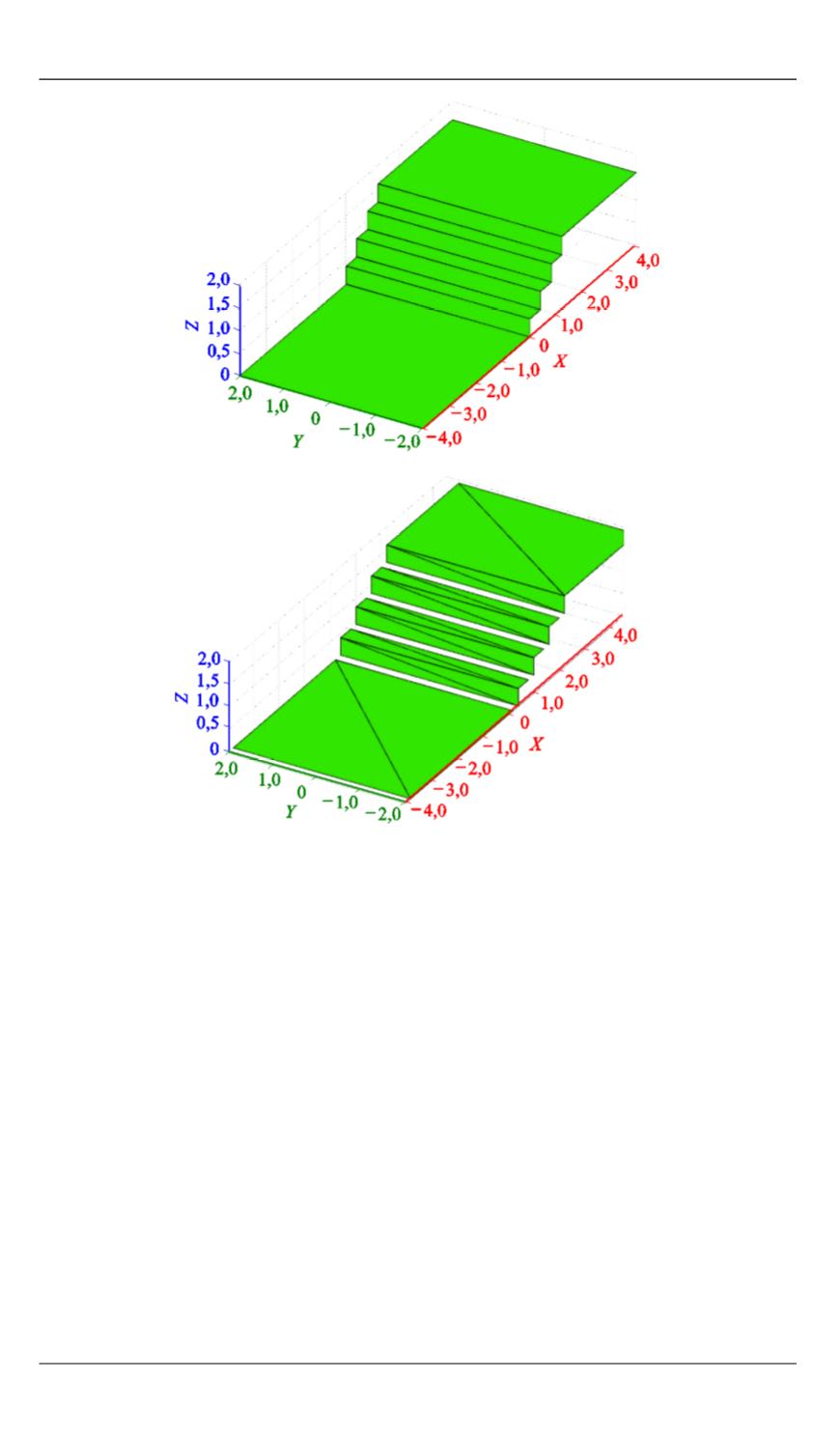
Рис. 5.
Обработка трассы «ступени»:
а
— исходная трасса;
б
— массив выпуклых многогранников
Следует обратить внимание на то, что трассы, имеющие плавные
вогнутые участки (например, синусоидальный профиль грунта на
рис. 6), описанный алгоритм разобьет на достаточно большое коли-
чество многогранников, что негативно скажется на производительно-
сти модели. В данном случае эффективнее использовать подход, опи-
санный в статье [4]. Тем не менее можно улучшить производитель-
ность, анализируя только многогранники, центры которых удалены
менее чем на половину суммы их габаритов (этот метод применен в
описываемой далее модели).
Краткое описание реализации имитационной компьютерной
модели.
Для реализации в имитационной компьютерной модели
уравнений динамики масс, преобразования координат и расчета шар-
ниров использованы блоки Simulink/Simscape/SimMechanics из
MATLAB R2013b. Данные объектов моделирования и трассы созданы
а