














 12 / 16
12 / 16

А.А. Стадухин
12
Инженерный журнал: наука и инновации
# 12·2016
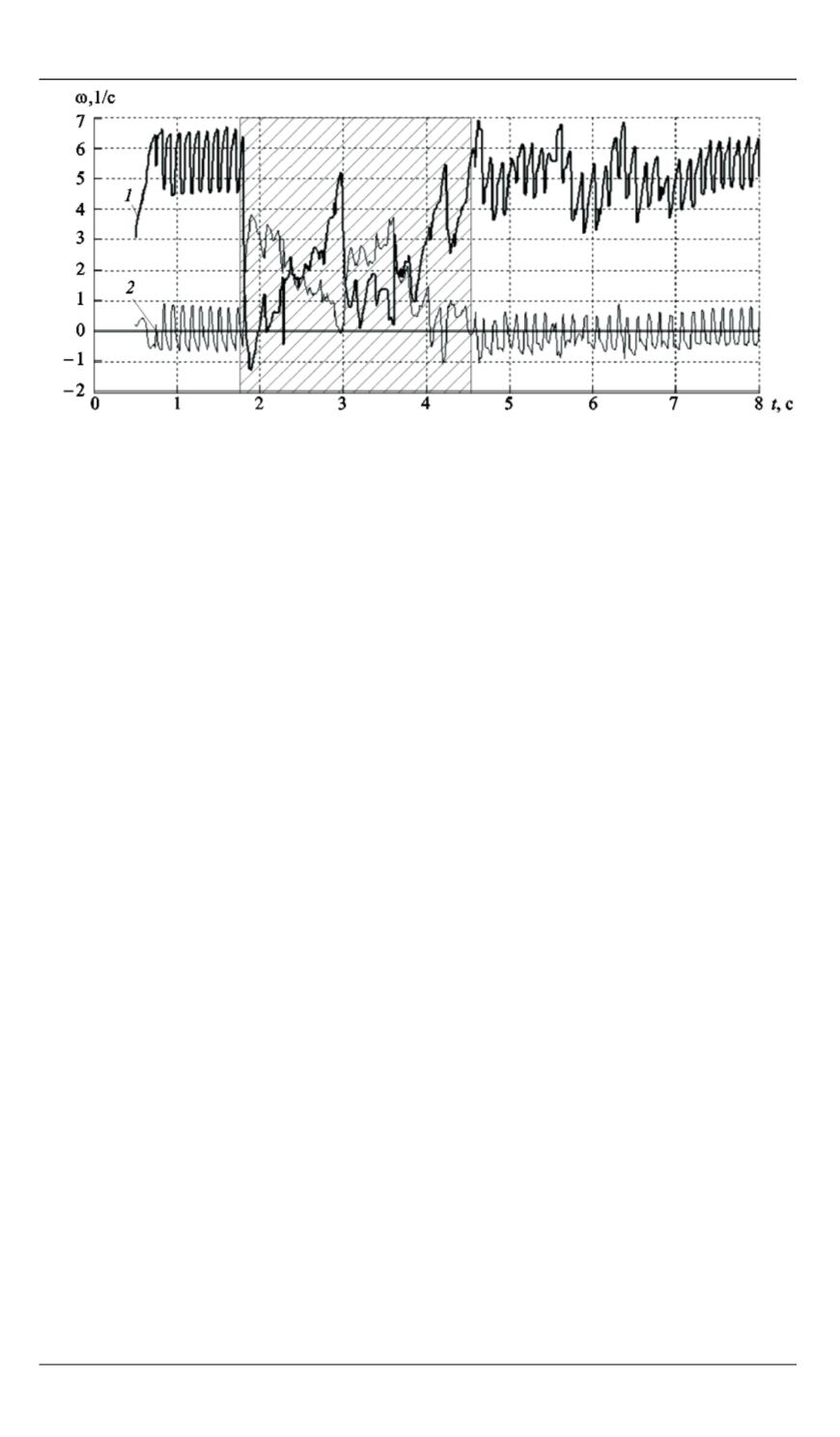
Рис. 11.
Запись угловой скорости для переднего правого движителя:
1
— угловая скорость колеса;
2
— угловая скорость водила
Моделирование подтвердило способность машины с колесно-
шагающим движителем преодолевать крупные препятствия опреде-
ленного профиля. Однако в процессе подбора размеров и передаточ-
ных чисел механизма движителя обозначились его известные серьез-
ные недостатки. Так, при недостаточной массе, избыточной тяге или
неправильно подобранных передаточных числах шестерен движитель
может перейти в режим шагания на ровной площадке. В случае же не-
достаточного сцепления катков с грунтом или слишком большой массы
машины шагание не начнется даже при упоре в стенку. Поэтому часто в
механизме предусматривают возможность торможения водила на кор-
пус и блокировку водила с приводной солнечной шестерней.
Заключение.
Применение алгоритмов для проведения анализа
пересечения многоугольников GJK, EPA и CA, а также средств моде-
лирования MATLAB/Simulink позволило создать компьютерную
имитационную модель движения транспортной машины по трассе
сложного профиля. Трасса может содержать вертикальные или обла-
дающие отрицательным уклоном стенки. Объект моделирования
должен состоять из набора выпуклых многогранников. В целом мо-
дель позволяет проводить анализ профильной проходимости и тяго-
вооруженности транспортных машин, в том числе с нетрадиционны-
ми движителями.
Предложенный метод позволяет реализовать сложные методы рас-
чета сил взаимодействия с опорным основанием, разработанные для
моделирования «контакта в точке» (например, как в работах [10, 11]).
К сожалению, с помощью разработанной модели невозможно ис-
следование гибкой гусеницы транспортной машины. Кроме того, на
результат моделирования может влиять представление плавных фи-
гур (например, цилиндрического или торообразного колеса) в виде