














 11 / 16
11 / 16

Моделирование взаимодействия мобильного робота и опорного основания…
Инженерный журнал: наука и инновации
# 12·2016 11
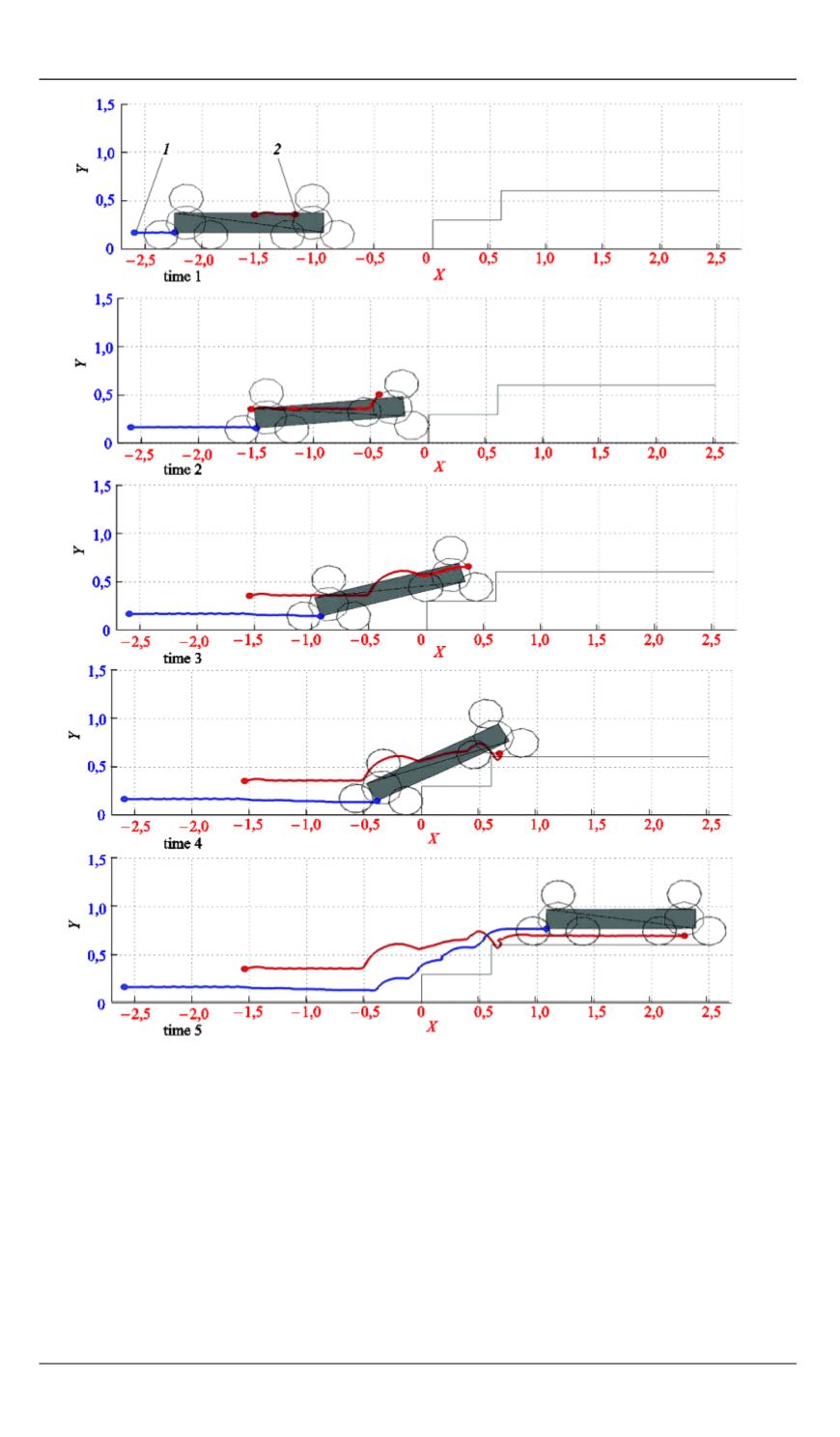
Рис. 10.
Моделирование движения мобильного робота по трассе:
1
— траектория точки корпуса;
2
— траектория точки на переднем правом водиле
Ниже показаны графики угловых скоростей колеса относительно води-
ла (рис. 11, кривая
1
) и водила относительно корпуса машины
(рис. 11, кривая
2
) для переднего правого движителя. Видно, что про-
хождение трассы началось с режима качения до упора в ступень пе-
редними движителями. Затем последовал режим шагания (зона, за-
штрихованная на рис. 11) и снова качения после преодоления пре-
пятствия передними движителями.