














 8 / 16
8 / 16

А.А. Стадухин
8
Инженерный журнал: наука и инновации
# 12·2016
б
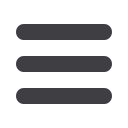
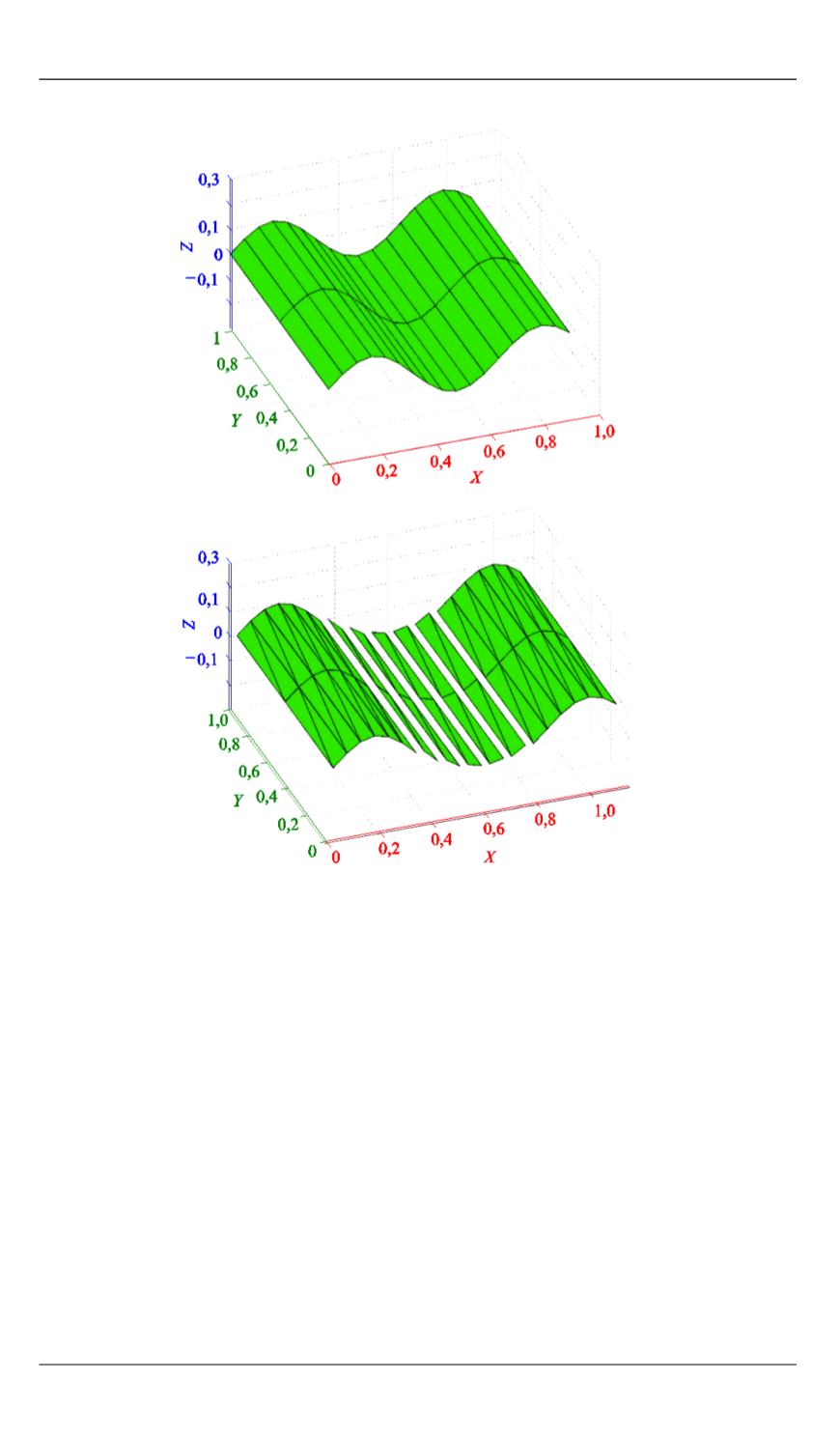
Рис. 6.
Обработка трассы «синусоида»:
а
— исходная трасса;
б
— массив выпуклых многогранников
и обработаны
,
по возможности, до начала моделирования. Алгорит-
мы GJK/EPA/Clipping вследствие сложности выполнены в виде
S
-функции (Simulink level 2
S
-function). Триангуляция трасс и объек-
тов для отображения графики выполнена с помощью функции
surf2patch и класса delaunayTriangulation. Поиск разности много-
угольников для алгоритма обрезки произведен посредством удобной,
но, к сожалению, очень медленной функции polybool.
Общий принцип работы
S
-функции анализа контакта следующий:
1) на вход подают абсолютную координату, скорость, матрицу
поворота и угловую скорость объекта — элементы машины;
2) осуществляется поиск многогранников трассы, с которыми
возможен контакт;
а