Об одном из подходов к описанию движения быстроходных агрегатов…
5
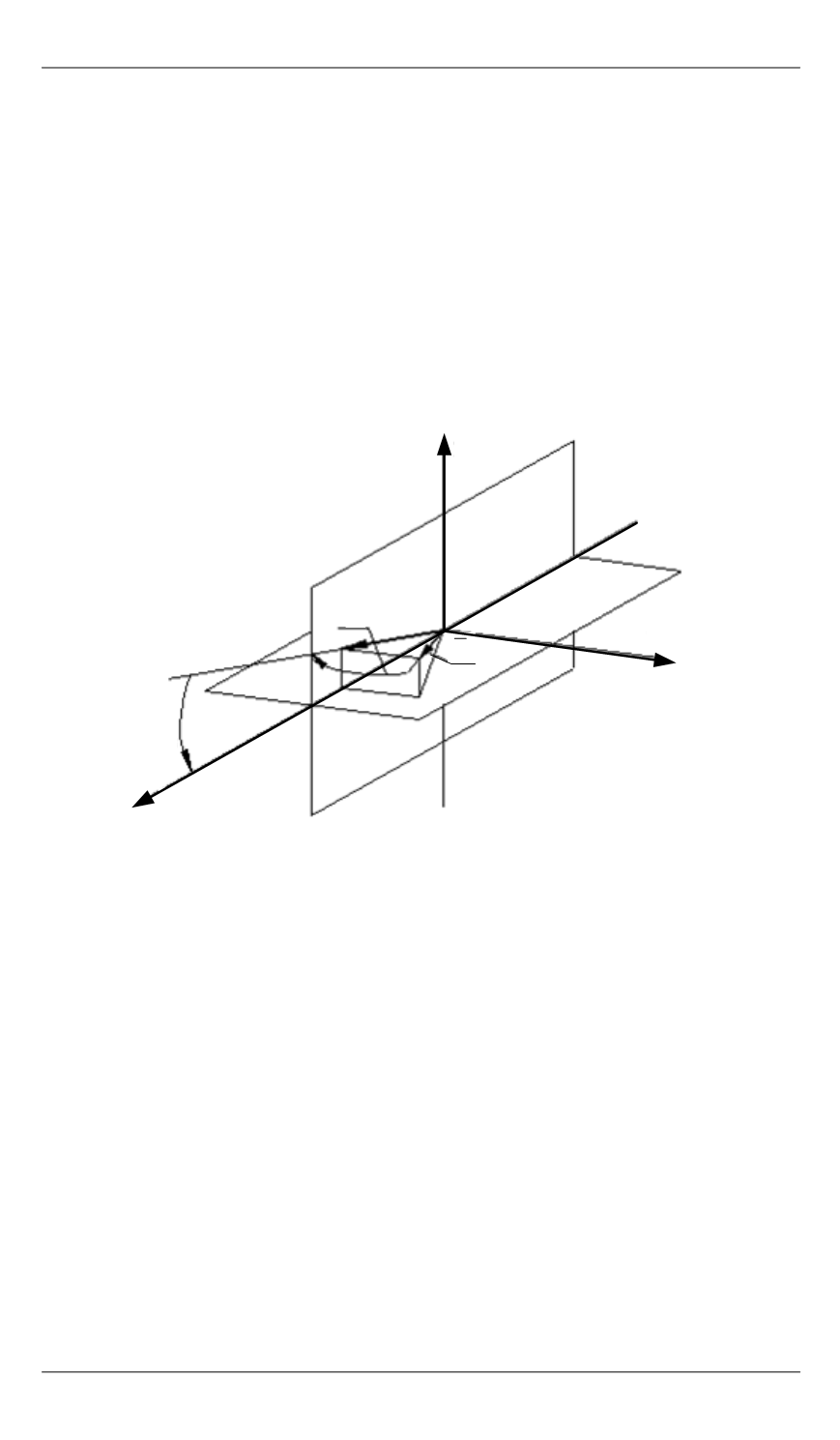
Аэродинамические силы, действующие на корпус БТА, зависят
от ориентации корпуса относительно набегающего потока воздуха.
Положение корпуса относительно вектора скорости задается двумя
углами: углом атаки α и углом дрейфа (увода) β.
Угол атаки определяется как угол между проекцией вектора ско-
рости корпуса БТА на плоскость симметрии машины и осью
ОX
3
свя-
занной системы координат СК3 (рис. 4), а угол дрейфа — как угол
между вектором скорости БТА и плоскостью его симметрии (в тео-
рии полета угол дрейфа обычно называют углом скольжения лета-
тельного аппарата).
3
X
α
β
3
Z
3
Y
0
О
0
V
Рис. 4.
Ориентация корпуса БТА относительно скорости
Следует различать системы координат, в которых направление
оси
ОХ
задается по направлению путевой скорости БТА и по направ-
лению его воздушной скорости (скорости относительно реального
потока воздуха с учетом скорости ветра).
Схема на рис. 5 показывает порядок преобразования одной си-
стемы координат в другую путем последовательных вращений [2].
Произвольный вектор
r
, заданный компонентами в некоторой си-
стеме координат СК1, в матричной форме имеет вид
т
1
1 1 1
.
x
y
z
r r r
= ⎡
⎤
⎣
⎦
r
Для пересчета составляющих вектора
r
при переходе от одной
системы координат к другой используют ортогональные матрицы
преобразования координат
.
m n
A
(
m
— индекс, указывающий исход-
ную систему координат,
n
— индекс новой системы координат, по-


