Об одном из подходов к описанию движения быстроходных агрегатов…
3
ОZ
0
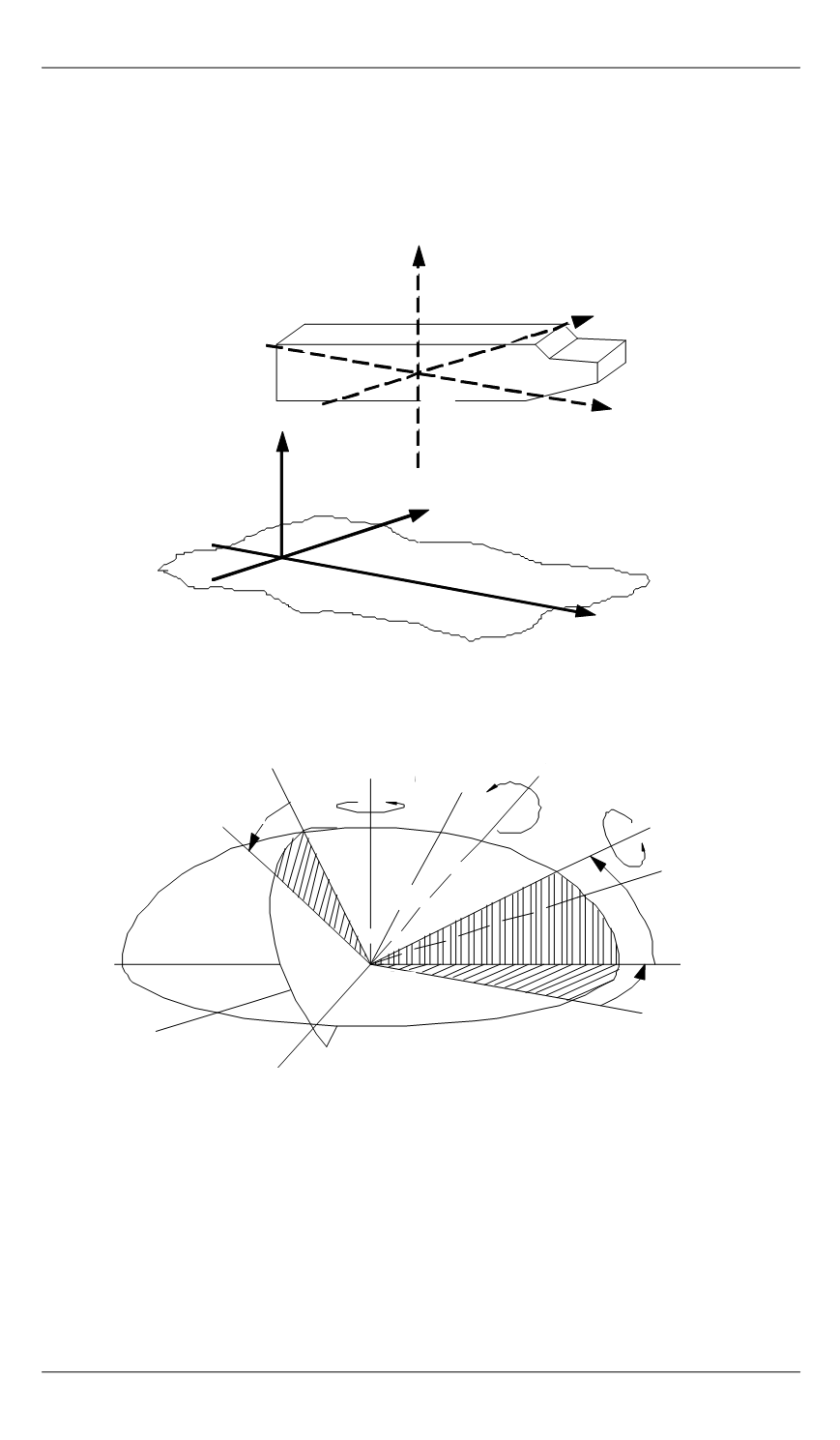
(рис. 2). Угол ψ принято называть курсовым углом или углом
рыскания и определять его как угол между проекцией продольной
оси БТА на горизонтальную плоскость и начальным направлением на
этой плоскости.
*
0
Z
*
0
Y
*
0
X
*
0
O
0
Z
0
Y
0
X
0
O
Рис. 1.
Расположение и ориентация осей земных систем координат СК0* и СК3
3
X
2
X
2
Y
1
Y
3
Y
0
Z
1
Z
2
Z
3
Z
γ
0
O
0
X
0
Y
1
X
η
ψ
Рис. 2.
Основные системы координат, связанные с корпусом БТА:
нормальная система координат корпуса БТА
X
0
Y
0
Z
0
(СК0), горизонтирован-
ная связанная система координат корпуса БТА
X
1
Y
1
Z
1
(СК1), связанная ста-
билизированная система координат корпуса БТА
X
2
Y
2
Z
2
(СК2), связанная
система координат корпуса БТА
X
3
Y
3
Z
3
(СК3)
Связанная и стабилизированная по крену система координат СК2
получается дальнейшим поворотом горизонтированной системы СК1
на угол η относительно оси
ОY
1
(см. рис. 2). Угол η принято называть


