С.Д. Попов
4
углом тангажа и определять его как угол между продольной осью
БТА и горизонтальной плоскостью.
Связанная система координат СК3 получается поворотом систе-
мы СК2 на угол γ относительно оси
ОX
2
(см. рис. 2). Угол γ принято
называть углом крена и определять его как угол между плоскостью
симметрии БТА и вертикальной плоскостью, содержащей его про-
дольную ось.
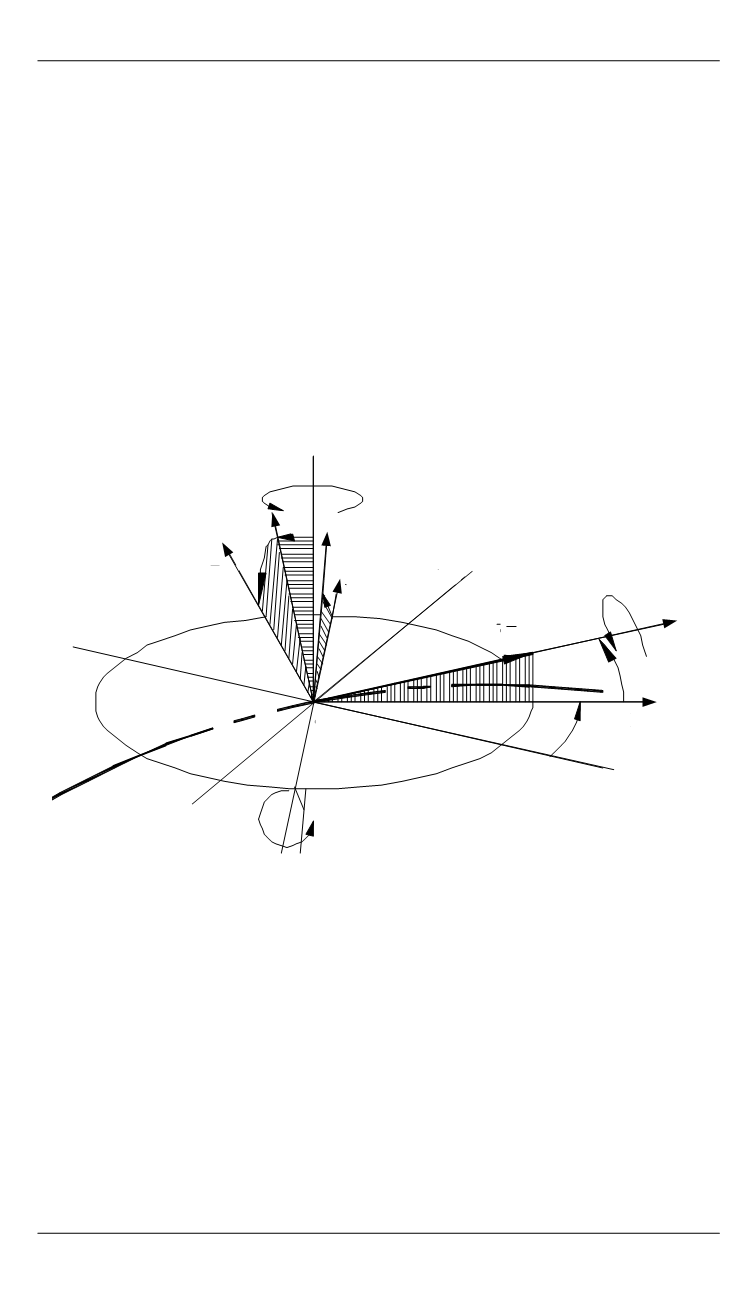
Горизонтированная траекторная система координат СК1
V
обра-
зуется из нормальной поворотом осей на угол φ относительно оси
ОZ
0
(рис. 3). Угол φ принято называть путевым углом или углом по-
ворота траектории БТА и определять его как угол между проекцией
вектора путевой скорости БТА на горизонтальную плоскость и
начальным направлением на этой плоскости.
1
V
Z
2
V
Z
3
V
Z
0
Z
3
V
Y
2
V
Y
1
V
Y
0
Y
0
О
V
γ
υ
3
V
X
2
V
X
1
V
X
0
X
ϕ
υ
0
V
Рис. 3.
Траекторные и скоростные системы координат
Траекторная система координат СК2
V
образуется из системы
СК1
V
дальнейшим поворотом осей на угол υ относительно оси
ОY
1
V
(см. рис. 3). Угол υ принято называть углом наклона траектории БТА
к горизонту или углом наклона траектории и определять его как угол
между вектором путевой скорости БТА и горизонтальной плоско-
стью.
Скоростная система координат СК3
V
образуется из траекторной
следующим поворотом ее осей на угол γ
V
относительно оси
ОX
1
V
(см. рис. 3) до ее совпадения с осью трехгранника, нормального к
траектории движения центра масс корпуса БТА.


