Исследование задачи аппроксимации траектории плоского разворота …
7
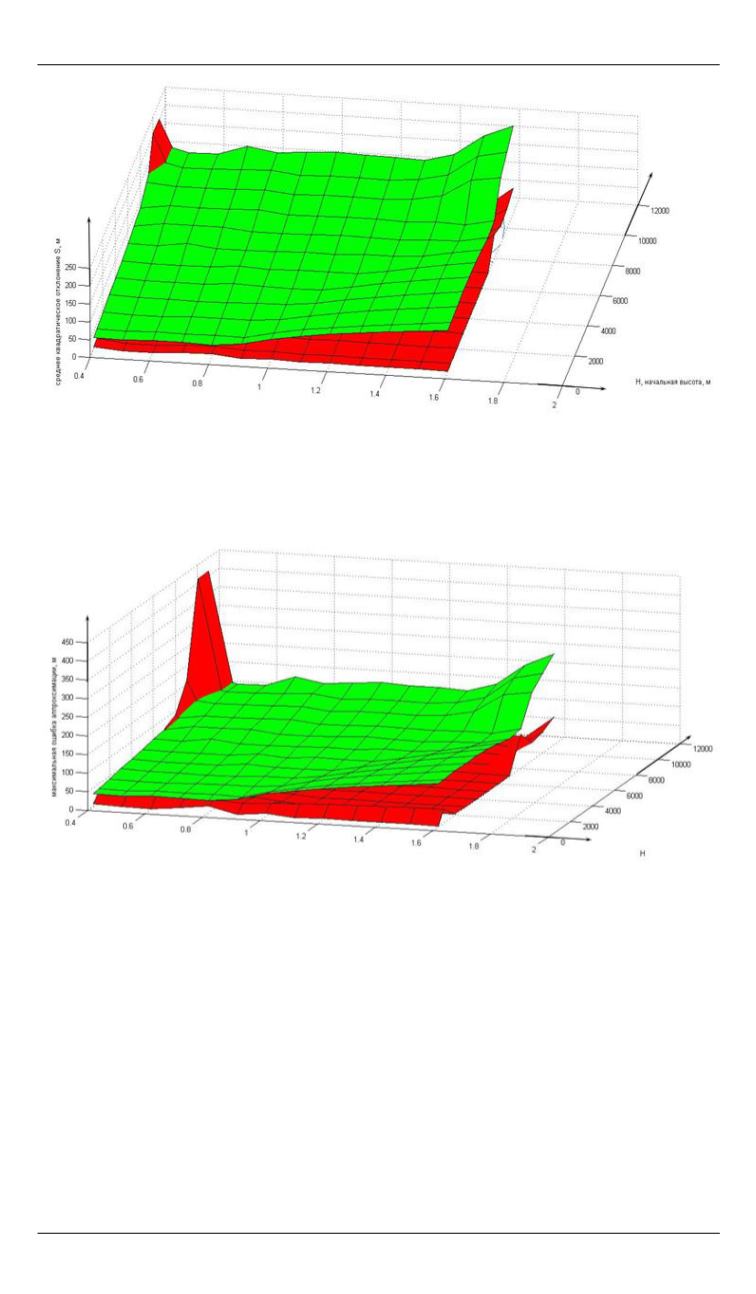
Рис. 7.
Сравнение среднеквадратического отклонения и допустимой
погрешности
Рис. 8.
Сравнение наибольшего отклонения аппроксимированной
траектории от реальной и допустимой погрешности
4. Исследование задачи нелинейной аппроксимации траекто-
рии разворота в заданном диапазоне высот и скоростей на основе
рассчитанных опорных траекторий.
Далее рассматривается задача
полиномиальной аппроксимации траектории разворота летательного
аппарата в плоскости с целью увеличения точности аппроксимации и
диапазона начальных высот и скоростей, в котором аппроксимация
траектории работает с допустимой погрешностью. Задача рассматри-
вается для начальной высоты
H
= 5000 м. Для ее решения разработан
двухэтапный алгоритм полиномиальной аппроксимации. На первом


