А.А. Карпунин, Е.А. Зазирный
2
пустимой для текущего режима полета максимальной тяге
доп
двmax
P
и
при максимальной допустимой нормальной перегрузке
доп
max
y
n
. Пред-
полагается, что в процессе разворота управление формируется таким
образом, чтобы высота летательного аппарата была постоянной. Это
осуществляется применением автомата по высоте. Данный режим
движения выбран, поскольку он требуется для решения сопутствую-
щих задач координированного управления.
Начальная скорость
V
(
t
0
) варьируется в диапазоне [0,17; 1,7] М с
шагом 0,17 M; высота
H
— в диапазоне [250; 11000] м с шагом 250 м.
Температура на уровне моря принимается равной
T
= 15 °C.
Для вычисления координат аппроксимированной траектории необ-
ходимо найти и сохранить координаты опорных траекторий высокома-
невренного летательного аппарата при полной тяге двигателей и макси-
мальной допустимой нормальной перегрузке для начальных значений
скорости и высоты в заданном диапазоне по равномерной сети.
Высота
H
варьируется в диапазоне от 250 до 11 000 м с шагом
250 м. Расчет производится для следующих параметров и начальных
условий:
0
0
0
0
( ) 0, ( ) 2π / 9,
15 C, ( ) 0,9M, ( ) 0, ( ) 0
k
t
t
T
V t
x t
z t
Ψ = Ψ = −
= °
=
=
=
.
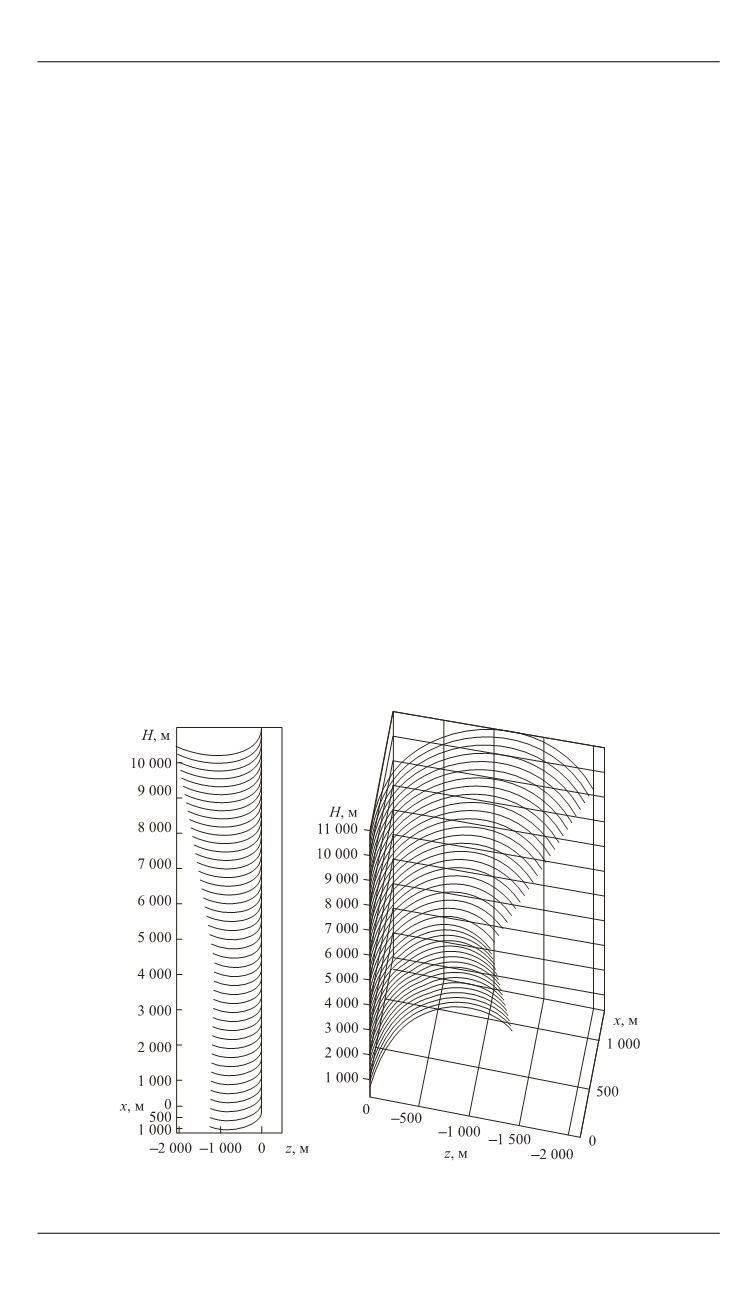
Результаты моделирования по указанной сети высот представле-
ны на рис. 1.
Рис. 1.
Зависимость траектории разворота от высоты


