А.А. Карпунин, Е.А. Зазирный
12
Для этого выполняется оценка величины среднеквадратического
отклонения и максимального расстояния между аппроксимированной
по полиномам траектории и рассчитанной по исходной модели для
частного случая для каждой аппроксимирующей функции.
Затем полученные результаты сравниваются с результатами
оценки погрешности линейной аппроксимации, приведенными в п. 3.
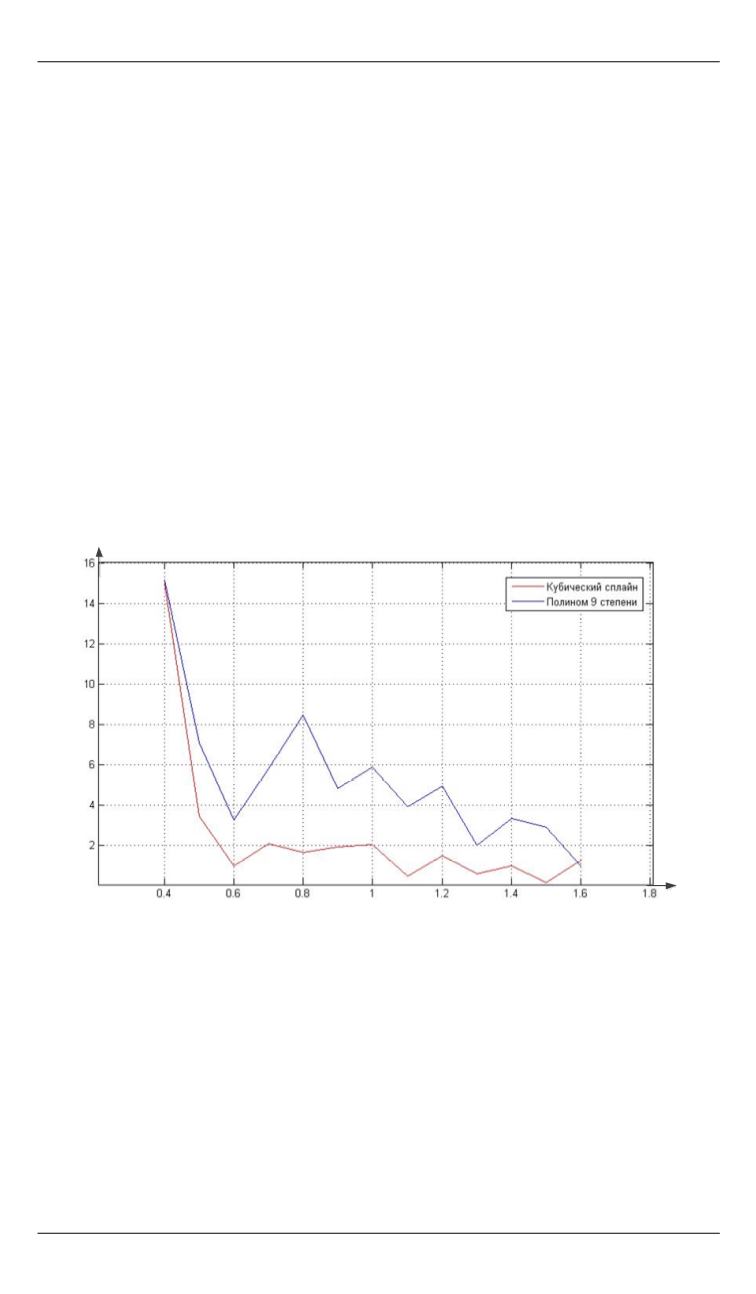
На рис. 13 представлены зависимости среднеквадратического от-
клонения аппроксимированной траектории разными аппроксимиру-
ющими функциями от начальной скорости
S
(
V
(
t
0
)) для диапазона
начальных скоростей
0
( )
V t
от 0,4 до 1,6 М c шагом 0,1 М.
Для сравнения точности линейной и полиномиальной аппрокси-
мации разными аппроксимирующими функциями на рис. 14 изобра-
жены зависимости расстояния
Δ
(
Ψ
(
t
k
)) от аппроксимирующей траек-
тории до траектории, рассчитанной по исходной модели, где
Ψ
(
t
k
) —
желаемый угол поворота траектории, а
Δ
— расстояние от аппрокси-
мированной траектории до рассчитанной по исходной модели.
0
( ),M
V t
0
( ( )),м
S V t
Рис. 13.
Зависимость среднеквадратического отклонения
аппроксимированной траектории от начальной скорости
S
(
V
(
t
0
))
Зависимость
Δ
(
Ψ
(
t
k
)) рассчитана для каждого метода построения
аппроксимирующей траектории для следующих начальных условий:
начальная скорость
V
(
t
0
) = 1 M, высота
H
= 5000 м.
Из рис. 14 можно сделать вывод, что наиболее точная аппрокси-
мация достигается при выборе кубического сплайна в качестве ап-
проксимирующей функции.


