А.А. Карпунин, Е.А. Зазирный
4
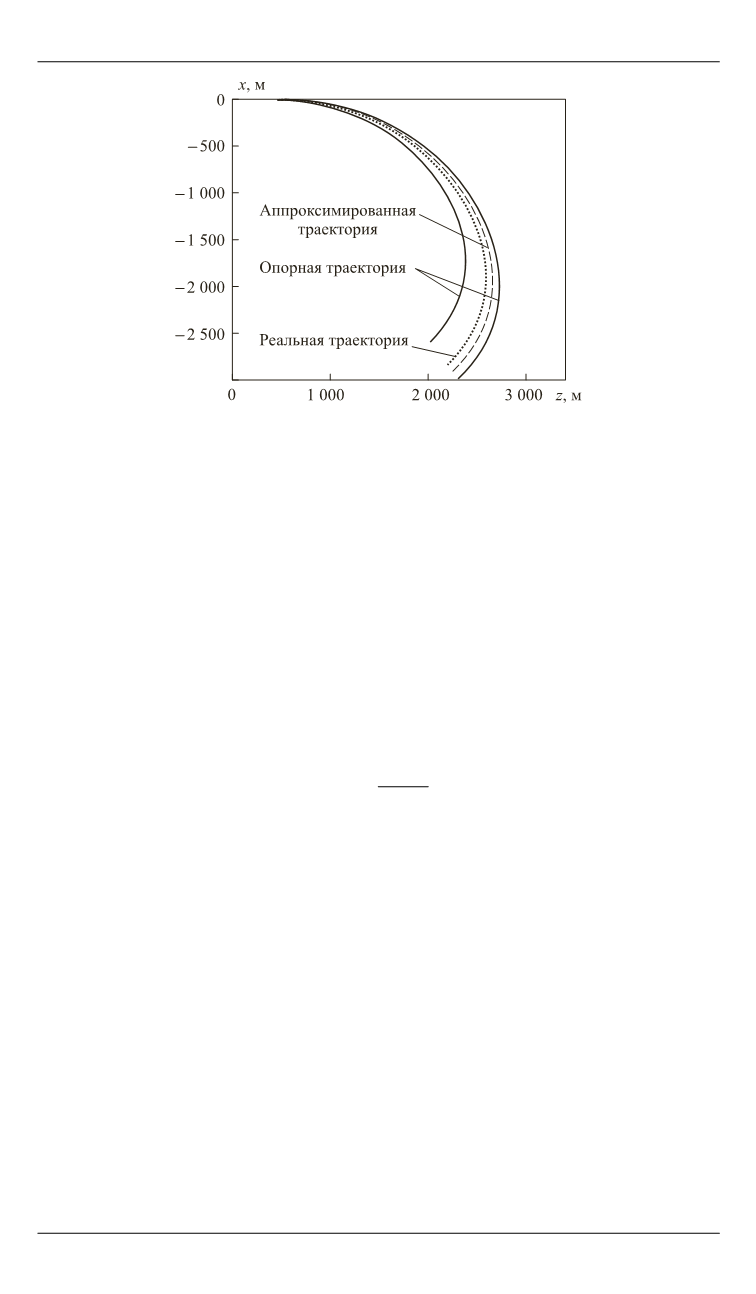
Рис. 3.
Аппроксимированная траектория
при
V
(
t
0
) = 1,6 М,
H
= 8000 м
2. Анализ погрешности аппроксимации.
Рассчитаем значение
погрешности для заданного диапазона начальных высот и скоростей
и тем самым определим диапазон начальных высот и скоростей, в
котором аппроксимация применима с допустимой погрешностью.
За допустимый уровень погрешности принимается ошибка вели-
чиной 1% от мгновенного радиуса разворота в точке наибольшего
отклонения аппроксимированной траектории от реальной.
Мгновенный радиус разворота в текущий момент рассчитывается
по формуле
2
( )
( )
( )
y
V t
r t
n t
=
,
где
V
(
t
) — текущая скорость,
n
y
(
t
) — текущая нормальная перегрузка.
Для упрощения вычислений определим момент времени, в котором
наблюдается наибольшее отклонение аппроксимированной траектории
от реальной. Зависимость отклонения
S
аппроксимированной траекто-
рии от реальной для угла поворота траектории
Ψ
для высоты
H
= 8000
м и скоростей в диапазоне [0,2; 1,6] М приведена на рис. 4.
Наибольшая ошибка аппроксимации наблюдается в момент за-
вершения маневра при
Ψ
(
t
k
) = 140°. Анализ рис. 4 показывает, что в
зависимости от скорости движения наибольшие погрешности дости-
гаются при скоростях свыше 1,2 М и ниже 0,4 М. В оставшемся диа-
пазоне погрешность аппроксимации значительно меньше.
Для проверки данная зависимость рассматривается для частного
случая: начальные данные
V
(
t
0
) = 1,6 М;
H
= 8000 м. Сечение графика,
представленного на рис. 4, при данных значениях показано на рис. 5.


