Исследование задачи аппроксимации траектории плоского разворота …
3
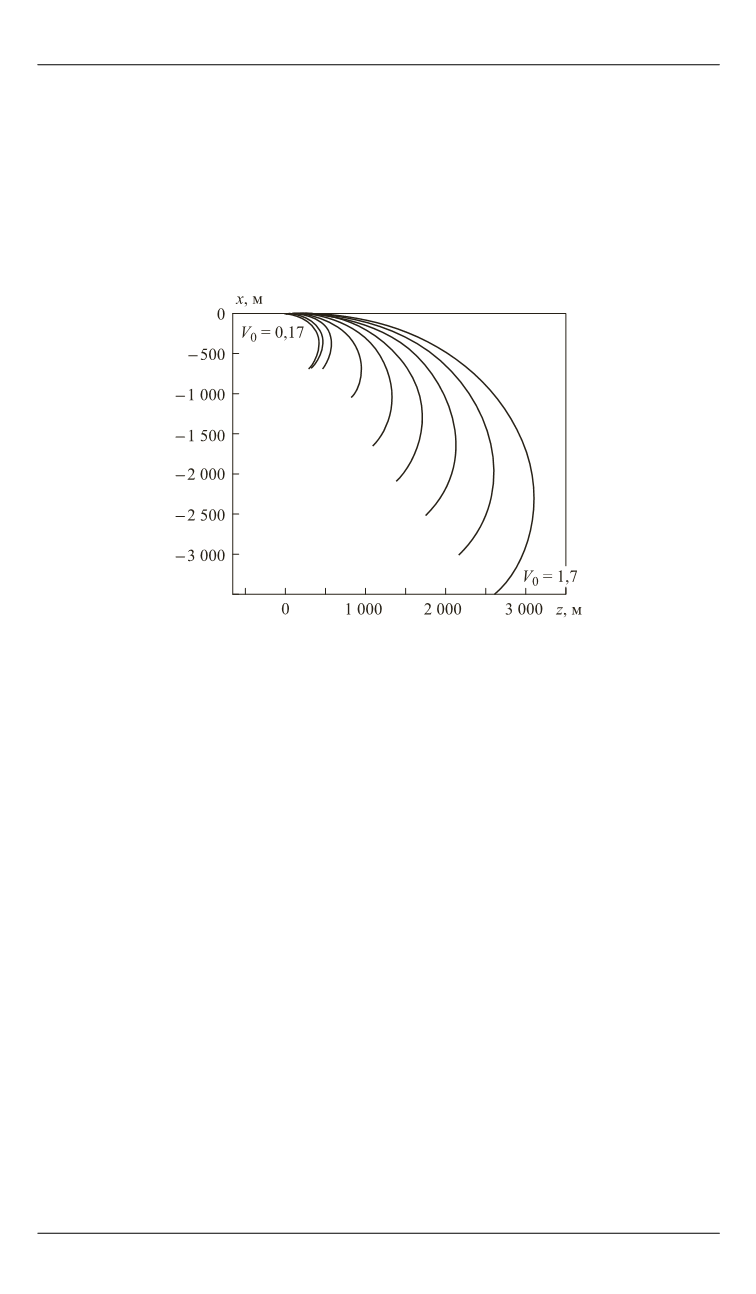
Начальная скорость
V
(
t
0
) варьируется в диапазоне от 0,17 до 1,7
М с шагом 0,17 М. Расчет производится для следующих параметров и
начальных условий:
0
0
0
( ) 0, ( ) 2π / 9,
15 C,
5000 м, ( ) 0, ( ) 0
k
t
t
T
H
x t
z t
Ψ = Ψ = −
= °
=
=
=
.
Результаты моделирования по указанной сети скоростей пред-
ставлены на рис. 2.
Рис. 2.
Зависимость траектории разворота от начальной скорости
Разработан алгоритм линейной аппроксимации, который позво-
ляет находить координаты траектории разворота для любой началь-
ной высоты и скорости.
Для аппроксимации выполняется поиск двух ближайших опор-
ных траекторий и вычисляются координаты аппроксимированной
траектории для каждого угла поворота траектории
Ψ
(
T
), где
Ψ
(
T
) = [0, 360]° как линейная пропорция между траекториями
.
На рис. 3 представлен пример построения аппроксимированной
траектории на основе двух смежных опорных траекторий, а также
реальная траектория, построенная для следующих начальных пара-
метров:
0
( ) 1, 6 M,
8000 м
V t
H
=
=
.
Из рисунка очевидно, что для рассматриваемого режима движе-
ния результаты линейной аппроксимации весьма далеки от реальной
траектории движения модели. Поэтому одной из задач данной рабо-
ты является исследование диапазонов параметров движения, для ко-
торых возможно использование процедуры аппроксимации.


