














 2 / 16
2 / 16

А.А. Стадухин
2
Инженерный журнал: наука и инновации
# 12·2016
сы-функции были посчитаны нормали, вдоль которых вычислялись
проникновение в грунт.
В той же статье [4] описаны недостатки предлагаемого метода —
сложность моделирования движения по профилю опорного основа-
ния с сильными изгибами, вычисление только контактов типа верши-
на — плоскость и необходимость выбора б
î
льшего количества точек
для контакта.
Настоящая статья посвящена решению таких трудностей путем
представления геометрии трассы и транспортной машины в виде
многогранников и использования существующих алгоритмов для
анализа их пересечений. Это позволит определять точки контакта
(точка К на рис. 1), направление и глубину проникновения много-
гранников (вектор
pnt
r
на рис. 1) в ходе моделирования. Назовем
нахождение точек контакта и векторов проникновения многогранни-
ков
разрешением контакта
.
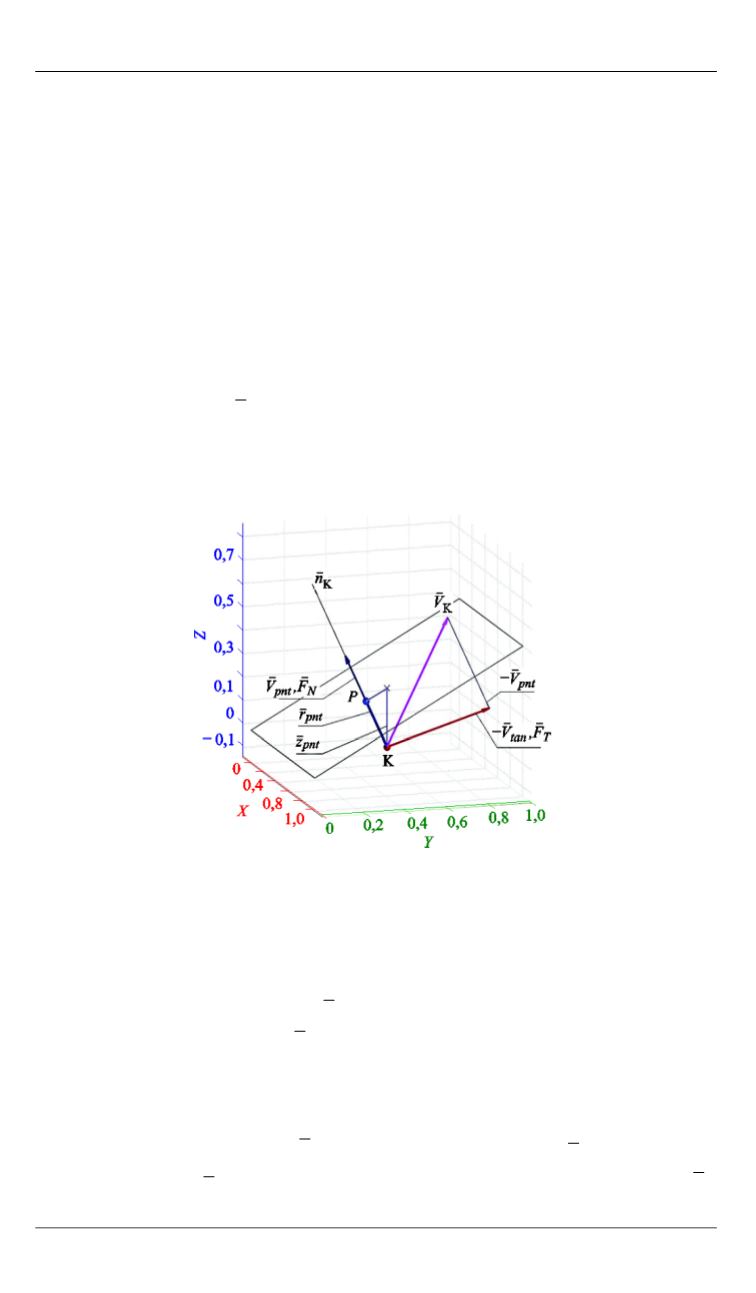
Рис. 1.
Схема определения сил взаимодействия машины
и опорного основания
Таким образом, после разрешения контакта для каждой точки по-
явится возможность найти следующие показатели:
— нормальные реакции
N
F
, воспринимающие вес машины;
— касательные силы
T
F
, обусловленные тягой машины и сопро-
тивлением движению;
— момент от суммарной силы взаимодействия с опорным осно-
ванием.
Нормальные реакции
N
F
вычисляют по глубине
pnt
r
и скорости
проникновения
pnt
v
в опорное основание. Касательные силы
T
F