Об одном методе решения задачи синтеза законов управления угловым движением…
11
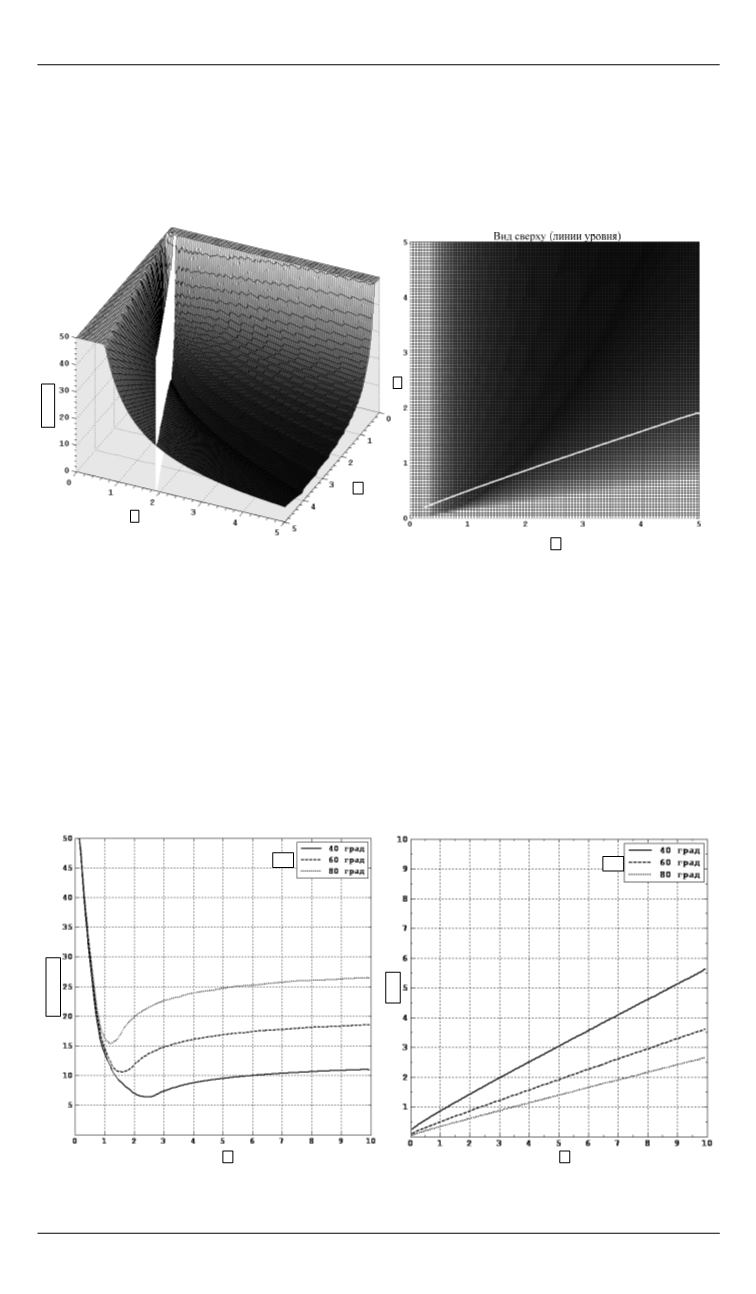
Зная ОДЗ параметров управления и построив поверхность
T
ПП
(
p
,
q
), можно определить значения
p
=
p
opt
и
q
=
q
opt
, при которых
достигается минимальное время ПП
T
ПП
=
T
ПП opt
. В качестве примера
это было проделано для рассмотренных ранее начальных условий
θ
0 = 60° и
0
0.
θ =
Результаты приведены на рис. 3.
p
( )
с ,
ПП
p,q T
p
q
q
Рис. 3.
Зависимость времени ПП от параметров управления при
θ
0
= 60°
и
0
0
θ =
По итогам проведенных исследований для различных значений
θ
0
и
0
θ
было установлено, что оптимальные значения параметров управ-
ления лежат на границе ОДЗ, а именно на кривой
q
=
q
lim
(
p
). Функцио-
нальные зависимости
T
ПП
(
p
,
q
lim
(
p
)) имеют единственный экстремум
— минимум, соответствующий относительно небольшим значениям
аргумента
p
(рис. 4). Это позволяет при отыскании точки минимума
p
opt
ограничить ОДЗ параметра
p
значением
p
lim
= 10.
p
(
)
с ,
,
ПП
lim
qp T
=θ
0
p
( )
p q
lim
=θ
0
Рис. 4.
Зависимости
T
ПП
(
p
,
q
lim
(
p
)) при
0
0
θ =
и различных значениях
θ
0


