Об одном методе решения задачи синтеза законов управления угловым движением…
13
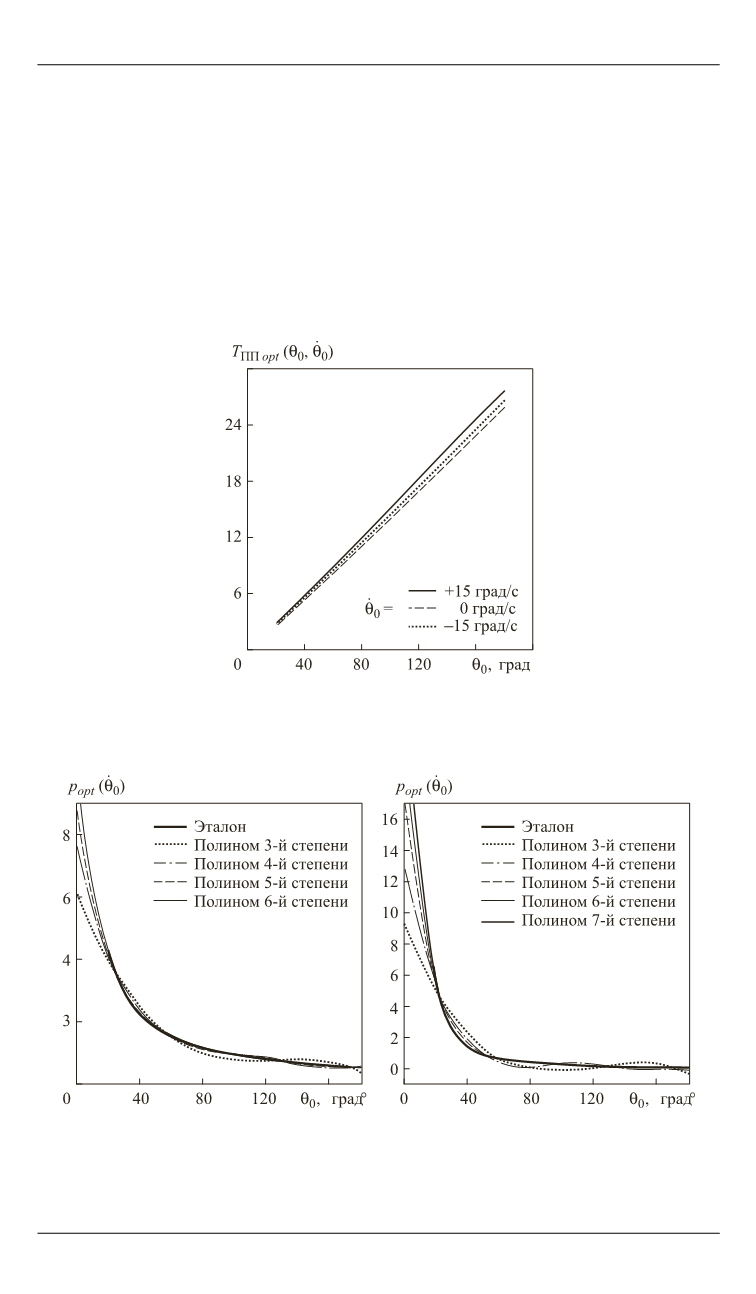
денные исследования (рис. 7) показали, что наименьшая степень по-
линома, который с приемлемой точностью аппроксимирует зависи-
мость
p
opt
(
θ
0
), равна шести. При этом зависимость
q
opt
(
θ
0
) следует ап-
проксимировать полиномом более высокой (седьмой) степени, по-
скольку важно отразить малые изменения параметра
q
opt
при значе-
ниях аргумента
θ
0
> 90° (это сильно сказывается на результирующей
величине
T
ПП
). Полученные полиномы могут экстраполировать соот-
ветствующие зависимости на всю область определения
θ
0
∈
(0°; 180°].
Рис. 6.
Оптимальные значения
T
ПП
при различных начальных условиях
Рис. 7.
Аппроксимация зависимостей
p
opt
(
θ
0
) и
q
opt
(
θ
0
) различными
полиномами


