Методы оценки погрешности измерения координат в комплексированных системах…
9
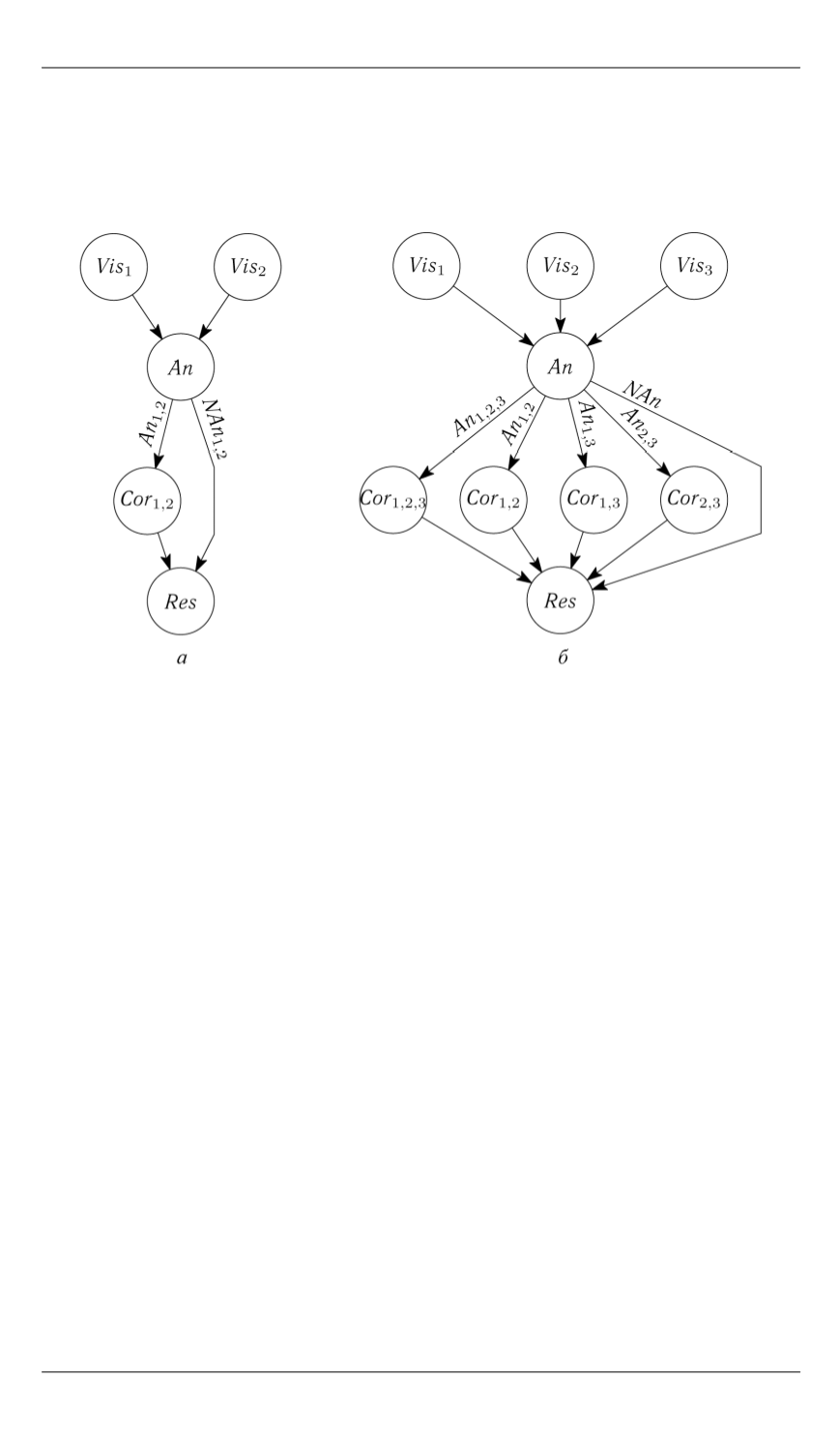
чтобы с общих позиций сформулировать задачу оценки эффектив-
ности алгоритмов, опишем общий алгоритм работы СРТО с помо-
щью байесовской сети (рис. 2). Ограничимся СРТО, состоящими из
не более чем трех устройств.
Рис. 2.
Байесовская сеть, описывающая общий алгоритм работы СРТО:
a
— для системы из двух устройств;
б
— для системы из трех устройств
Случайная переменная
= {1, 0}
i
Vis
определяет, видна (
= 1
i
Vis
)
или не видна (
= 0
i
Vis
) рассматриваемая точка объекта
i
-м устройст-
вом при заданных расположении и угловых полях устройств, а также
ориентации и форме объекта. Далее при описании вероятности
данного события для краткости используем запись
( )
i
P Vis
при
= 1
i
Vis
и
(
)
i
P NVis
при
= 0.
i
Vis
Переменная
An
определяет, какой из алгоритмов определения
соответствий обрабатывает полученные данные для рассмат-
риваемой точки. Для системы из двух устройств (рис. 2,
а
)
1,2
1,2
= { ,
},
An An NAn
т. е. алгоритм принимает решение о рассмотре-
нии данной точки (
1,2
=
An An
) или об отказе от попытки рассмот-
рения (
1,2
=
An NAn
). При описании системы из трех устройств
(рис. 2,
б
)
{
}
1,2,3 1,2 1,3 2,3
=
,
,
,
,
An An An An An NAn
. Для обработки дан-
ных могут быть задействованы различные алгоритмы — исполь-
зующий данные со всех трех устройств (
1,2,3
=
An An
), или исполь-
зующий данные с пары устройств (
,
=
i j
An An
для ( , ) =
i j
= {(1, 2), (1, 3), (2, 3)}), также может быть принято решение об отказе


