














 12 / 15
12 / 15

Л.А. Савин
12
Инженерный журнал: наука и инновации
# 6·2017
на основе 3D-модели МКС с использованием расчетных алгоритмов,
описанных, например, в работе [3]. Актуальную модель МКС в фор-
мате Autodesk 3ds Max регулярно поставляют в ЦУП-М проектные
подразделения РКК «Энергия». Наряду с указанным еще одним
наиболее полезным аспектом является использование сравнительного
анализа текущих данных об углах в шарнирах манипулятора с неко-
торыми заранее вычисленными модельными данными (рис. 6).
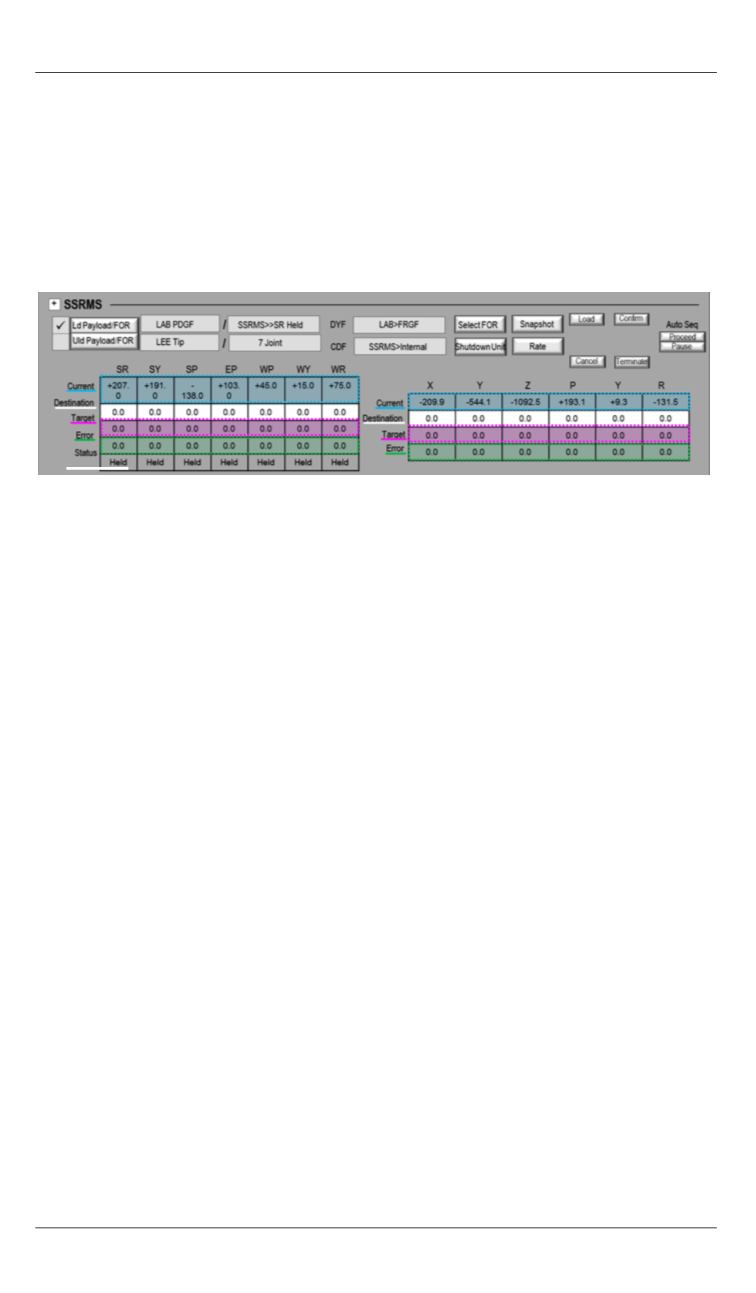
Рис. 6.
Окно анализа телеметрических данных об углах в шарнирах и координатах
концевого захвата манипулятора SSRMS
Голубым цветом в таблицах выделены текущие значения углов в
шарнирах (слева) и координат концевого захвата (справа), получае-
мые в режиме реального времени по телеметрическим данным. Бе-
лым и розовым цветом выделены (соответственно) промежуточные и
конечные расчетные величины углов и координат, рассчитанные за-
ранее при разработке траекторий перемещения манипулятора на мо-
делирующем оборудовании. В зеленой строке отображается текущее
рассогласование между реальными данными и расчетными (между
строками Current и Destination). За внешней простотой реализации
скрывается необходимое и полезное средство контроля критических
параметров манипуляторов.
Сложные пространственные перемещения манипуляторов вблизи
поверхности МКС и внешних элементов конструкции на этапе под-
готовки миссии тщательно отрабатываются на моделирующем обо-
рудовании. Рассчитываются возможные траектории, позволяющие
избежать опасных сближений самого манипулятора и переносимого
груза с элементами конструкции МКС. Во время реализации миссии
на борту в силу особенностей человеческого визуального восприятия
сложно, а порой и невозможно, оценить по телевизионной информа-
ции или 3D-изображениям, корректно ли выполняется запланирован-
ная траектория перемещения. Если на этапе моделирования выделить
на траектории перемещения ряд реперных точек, зафиксировать зна-
чения углов в шарнирах и координаты концевого захвата при про-
хождении каждой точки, то полученный набор данных можно ис-
пользовать в качестве эталона при реальном перемещении.