














 10 / 15
10 / 15

Л.А. Савин
10
Инженерный журнал: наука и инновации
# 6·2017
невзирая на длительную и продуктивную совместную российско-
европейскую работу по проекту ERA, содержание программ MPTE-B2
и ВМ на базе MPTE-B2 осталось недоступным для российских специа-
листов. В связи с этим собственные алгоритмы и программы имеют
явное преимущество относительно их улучшения, дополнения и пр.
Со штатными индивидуальными средствами обработки также
необходимо сравнить машину MS-IMMI, которая редко упоминалась.
Эта ЭВМ представляет собой аналог пульта управления манипулято-
ром. Различие с бортовым пультом состоит в том, что нет возможно-
сти выдавать с MS-IMMI команды на управление манипулятором и
сопряженными элементами. В остальном их функции идентичны
(рис. 5).
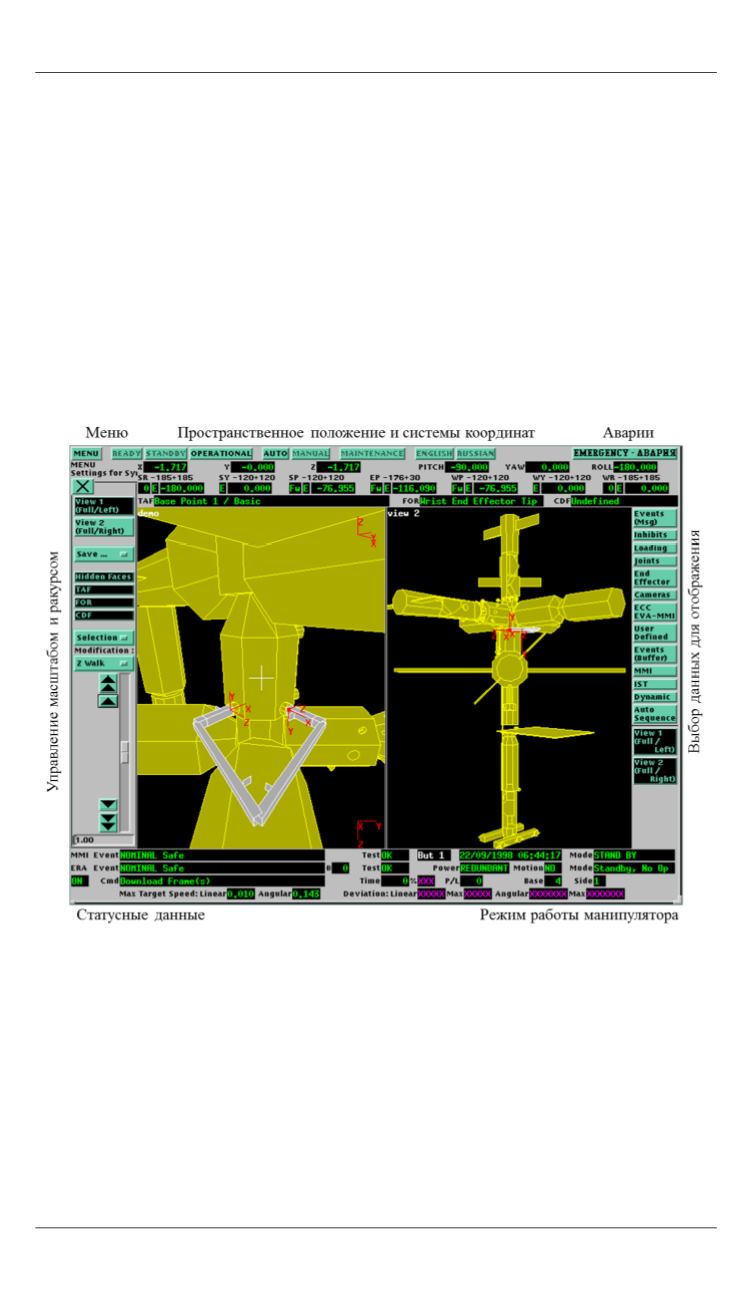
Рис. 5.
Отображение информации на экране MS-IMMI
В память MS-IMMI закладывается усеченная 3D-модель МКС.
Машина выполняет ряд геометрических вычислений и преобразова-
ний, используя в качестве исходных данных обработанные телемет-
рические параметры, поступающие из OLMS. На экран выводится
псевдотрехмерная картинка, позволяющая оценить пространствен-
ную позу манипулятора и его расположение относительно внешних
элементов МКС. На полях экрана помещены инструменты управле-
ния 3D-изображением и выведены наиболее критичные и статусные