

Моделирование колебаний с инерционным возмущением - page 9
T
Опре
колебани
Здесь ча
полученн
ника по ф
Затем
частоту в
лежки). С
специаль
колебани
каретки о
денных к
ний маят
Рис.
Моделир
1
5685
5 10
−
=
⋅
делим коэ
й
1
1 ln
5
n
T
=
стота коле
ого выше
ормуле
K
включим
озмущени
помощью
ных програ
й и соотве
т положен
олебаний
ника, напри
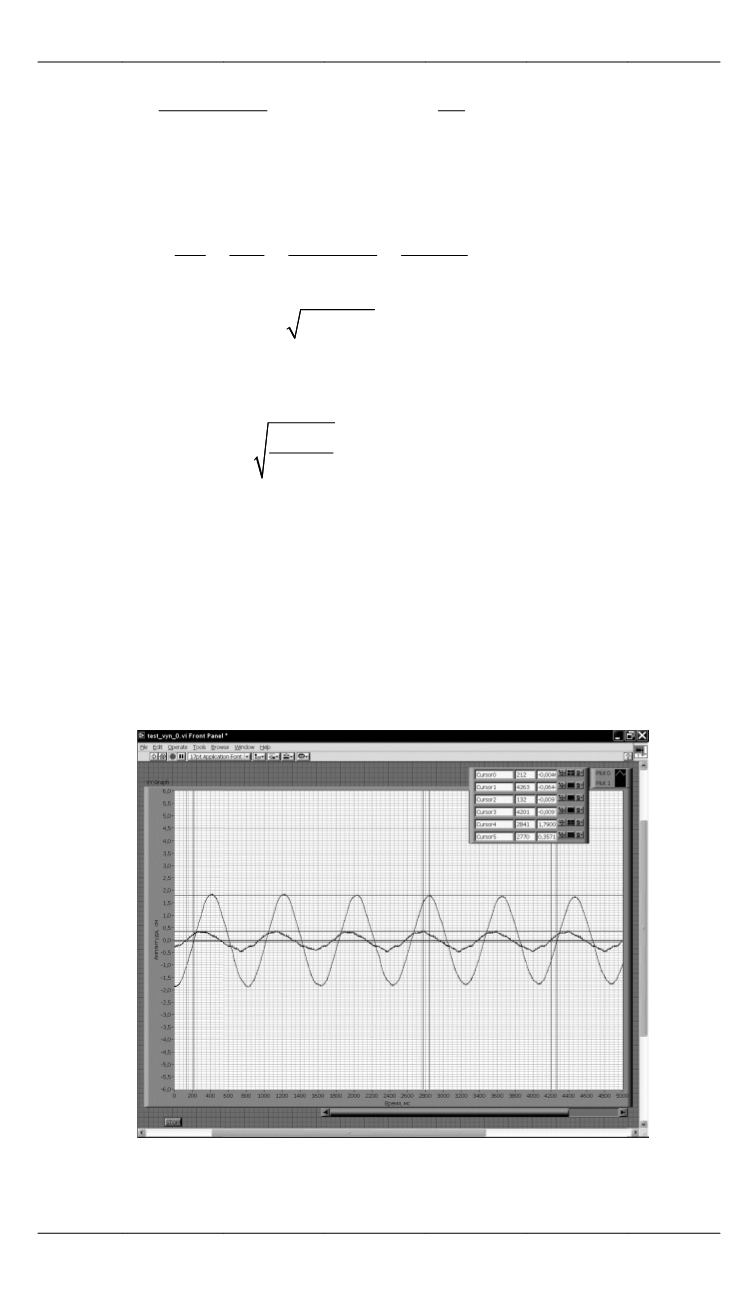
4.
Фрагмен
ование колеб
3
1763 0,78
=
ффициент
5
5 0,
i
i
q
q
+
=
⋅
2
1
K K
=
баний нем
расчетным
2
c
M m
=
+
электродв
я маятника
датчиков
мм для ЭВ
тствующее
ия равнов
каретки пр
мер при
ω
т записи ко
аний с инерц
1
44 c,
K
=
сопротивл
1
4,5 ln
7844 2,0
2
8,0
n
+ =
ного мень
путем бе
.
игатель и п
ω
(частот
линейных
М зарегис
ей значен
есия
(
,
i
x
ω
и различн
<
K
(см. ри
лебаний ма
ионным возм
1
1
2 ,
K
T
π
=
ения и ча
246 0, 20
044
=
13 рад/с.
ше ее знач
з учета ма
остепенно
у вынужде
(
x
) и угловы
трируем ча
ие максим
)
i
m
и полу
ых значени
с. 4).
ятника и ка
ущением
8,01 рад / с
стоту собс
76рад /с,
ения (8,06
ссы стерж
будем уве
нных колеб
х (
ϕ
) откл
стоту выну
ального от
чим записи
ях частоты
ретки при
ω
9
.
твенных
8 рад/с),
ня маят-
личивать
аний те-
онений и
жденных
клонения
вынуж-
колеба-
<
K
1,2,3,4,5,6,7,8
10,11,12,13,14,15,16
