Моделирование колебаний с инерционным возмущением - page 8
8
1
2 /
K
= π
системы
риод зат
мы и ее л
и
откуда
В ка
экране в
при выкл
Рассч
Q
=
K
/ 2
затухающ
1
,
T
кругов
без учета
ухающих к
огарифми
честве пр
иртуальног
юченном
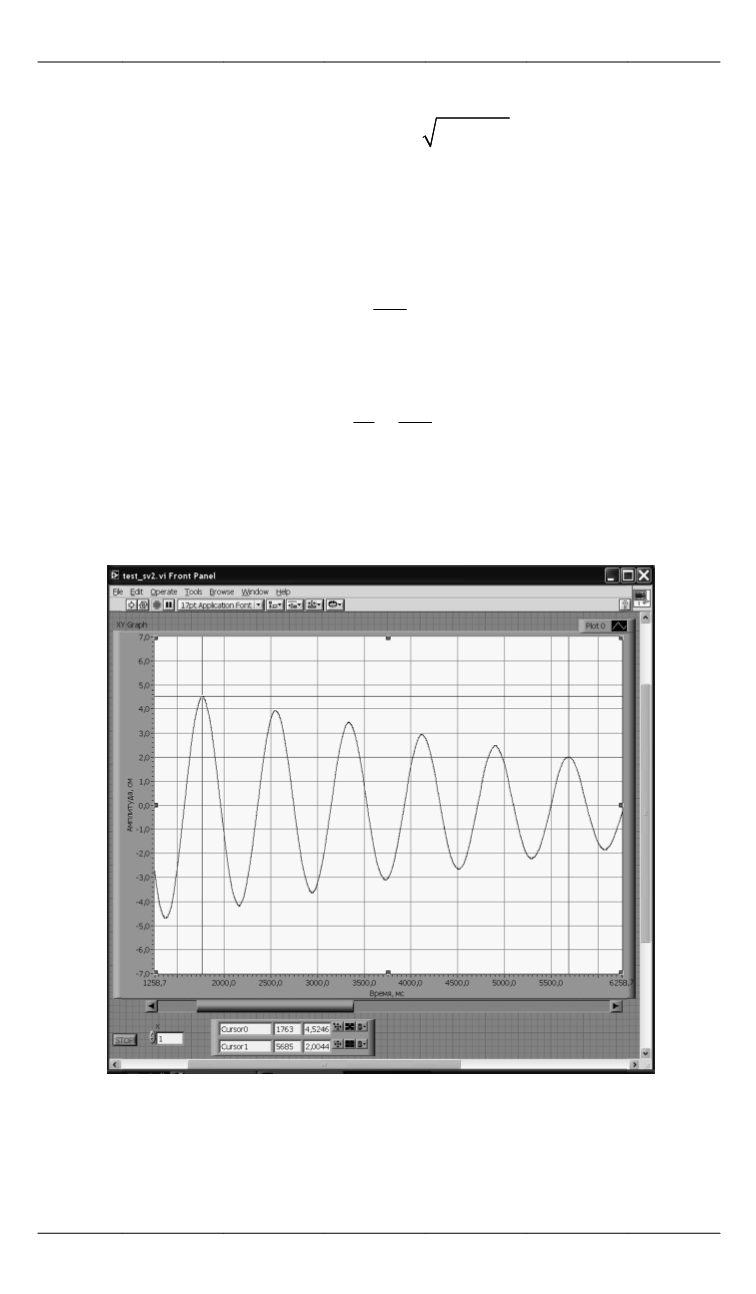
Рис. 3.
Фра
итаем зн
n
. Найдем
их колеба
В.В. Дуб
ую частот
сопротивл
олебаний
ческий дек
D
=
ln
D
n
имера на
о прибора
электродви
гмент запи
ачения
K
по отметк
ний каретк
инин, В.В. Ви
у свободн
ения
K
=
системы).
ремент кол
1
/
i
i
q q
+
=
1
ln
i
i
q
q
+
=
=
1
1
1 ln
i
i
q
T q
+
=
рис. 3 пр
свободны
гателе.
си свободны
и
n
, а
ам курсор
и с маятн
тушкин
ых (собст
2
2
1
K n
+
(
Декремен
ебаний
1
nT
e
1
,
nT
.
иведен ф
х колебан
х колебани
также доб
а условны
иком
венных) ко
T
1
— усло
т колебани
рагмент за
ий данной
й системы
ротность
е период и
лебаний
вный пе-
й систе-
писи на
системы
системы
частоту
1,2,3,4,5,6,7
9,10,11,12,13,14,15,16


