В.В. Дубинин, В.В. Витушкин
12
gm
F
′
x
δ
O
′
gM
F
N
O
′
F
′
F
gm
gM
N
gm
1
O
′
F
′
F
gm
gM
N
gm
1
O
′
F
′
F
gm
gM
N
e
v
r
v
v
O
′
F
′
F
gm
gM N
e
v
r
v
v
ϕ
gm
F
′
F
gM
N
e
v
r
v
v
O
′
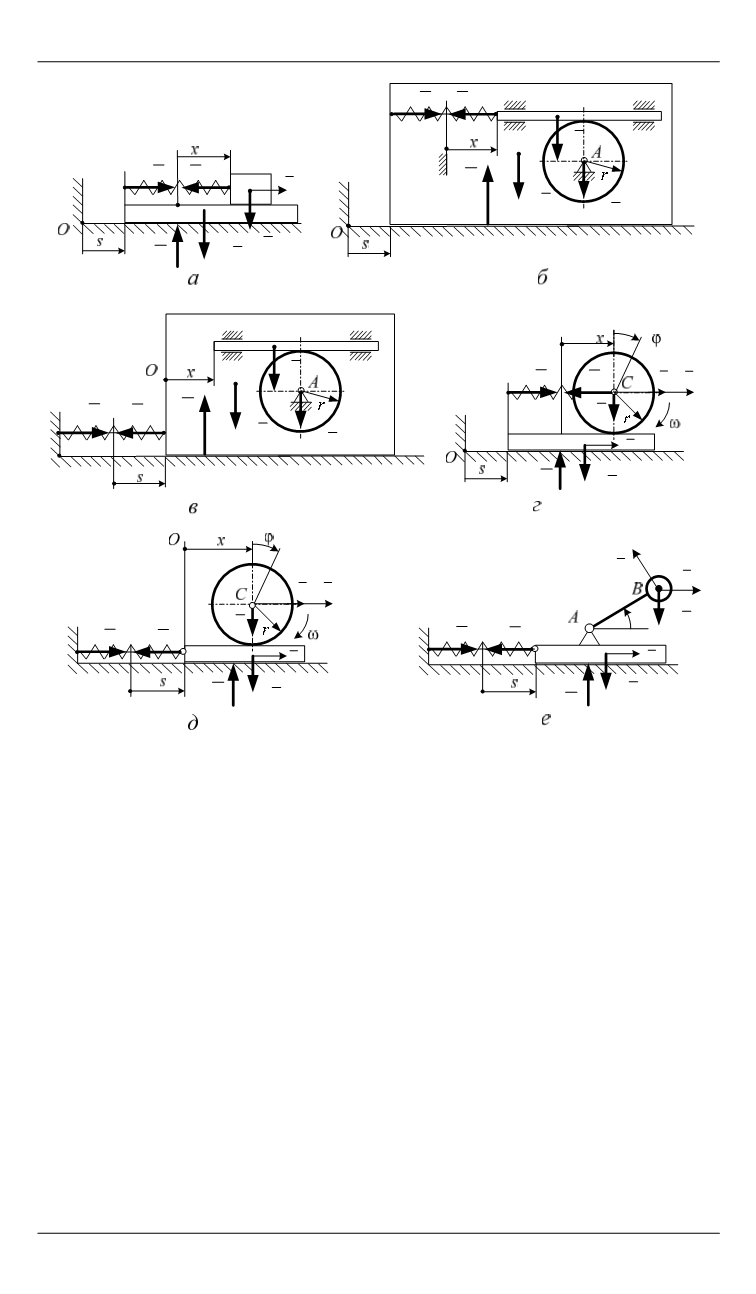
Рис. 6.
Типовые схемы реальных механических объектов с поступательны-
ми движениями тел при
(
)
0
sin
s s
t
=
ω + δ
(
а
); колеблющейся установки при
(
)
0
sin
s s
t
=
ω + δ
(
б
); механической системы с подпружиненным корпусом
при
(
)
0
sin
x x
t
=
ω + δ
(
в
); системы с плоским движением тела при
s
=
(
)
0
sin
s
t
=
ω + δ
(
г
); второго варианта системы с плоским движением тела
при
(
)
0
sin
x x
t
=
ω + δ
(
д
); системы с вращающейся деталью при
,
t
ϕ = ω
const
ω =
(
е
)
В силу того, что дифференциальные уравнения во всех рассмот-
ренных случаях аналогичны уравнениям (2), (4), созданная установ-
ка, позволяет получать АЧХ и ФЧХ для реальных установок (натур-
ных объектов) при одинаковых значениях добротности модели и
натурного объекта
м
н
.
Q Q
=
Рассмотрим вариант (см. рис. 6,
а
), в котором задано движение
платформы в соответствии с законом
(
)
0
sin
.
s s
t
=
ω + δ
В этом случае
коэффициент λ определяется формулой


