5
Перспективы развития системы подрессоривания быстроходных гусеничных машин
Управление двухуровневым демпфированием может быть со стати-
ческим (адаптивным) [8] и с динамическим законами управления. Во
втором случае наиболее эффективно демпфирование с учетом скорости
продольно-угловых колебаний корпуса БГМ.
Управляемая система подрессоривания требует использования бло-
ков управления (контроллеров, датчиков и т. п.), что усложняет систему
и снижает ее надежность. Однако существуют системы, которые без
специального управления позволяют обеспечить требуемое гашение
колебаний в резонансной области без повышения ускорений «тряски»
в зарезонансной области. Это многоуровневые системы подрессорива-
ния. В подвесках БГМ в качестве опытных образцов были выполнены
двухуровневые системы подрессоривания, наиболее известной из ко-
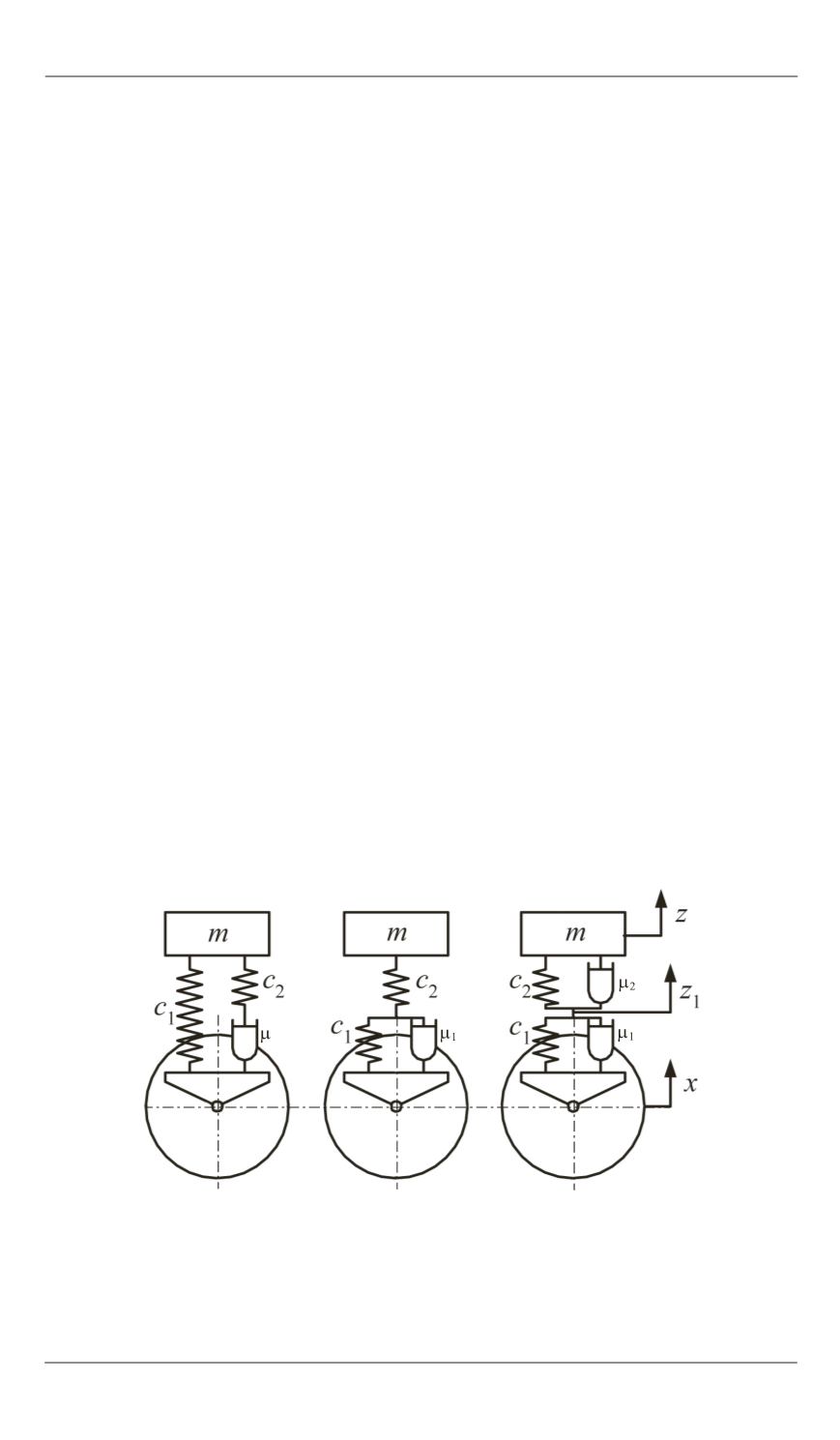
торых является релаксационная подвеска. Эта подвеска имеет два упру-
гих элемента и амортизатор [1]. Один упругий элемент включен между
корпусом и катком последовательно с амортизатором и образует с ним
так называемый релаксационный элемент. Второй упругий элемент со-
единяет корпус и каток параллельно релаксационному элементу и вы-
полняет роль основного упругого элемента подвески. Наличие двух
упругих элементов и схожесть свойств релаксационной подвески со
свойствами других вариантов многоуровневых подвесок позволяют
отнести ее к многоуровневым системам подрессоривания. Эквивалент-
ная схема такой подвески представлена на рис. 2,
а
.
В 60-х годах прошлого столетия в Академии бронетанковых войск
был разработан опытный образец релаксационного амортизатора. Од-
нако вследствие низкой надежности на серийных машинах его не ис-
пользовали.
а б в
Рис. 2.
Эквивалентные схемы одноопорных подвесок:
а
,
б
— релаксационная соответственно с параллельным и после-
довательным соединением дополнительного упругого элемента;
в
— фрактальная двухуровневая


