8
Б.Б. Кулаков, Д.Б. Кулаков, В.В. Беляев
лись исследования законов управления электрогидравлическими при-
водами, обеспечивающих человекоподобные движения антропоморф-
ных исполнительных механизмов.
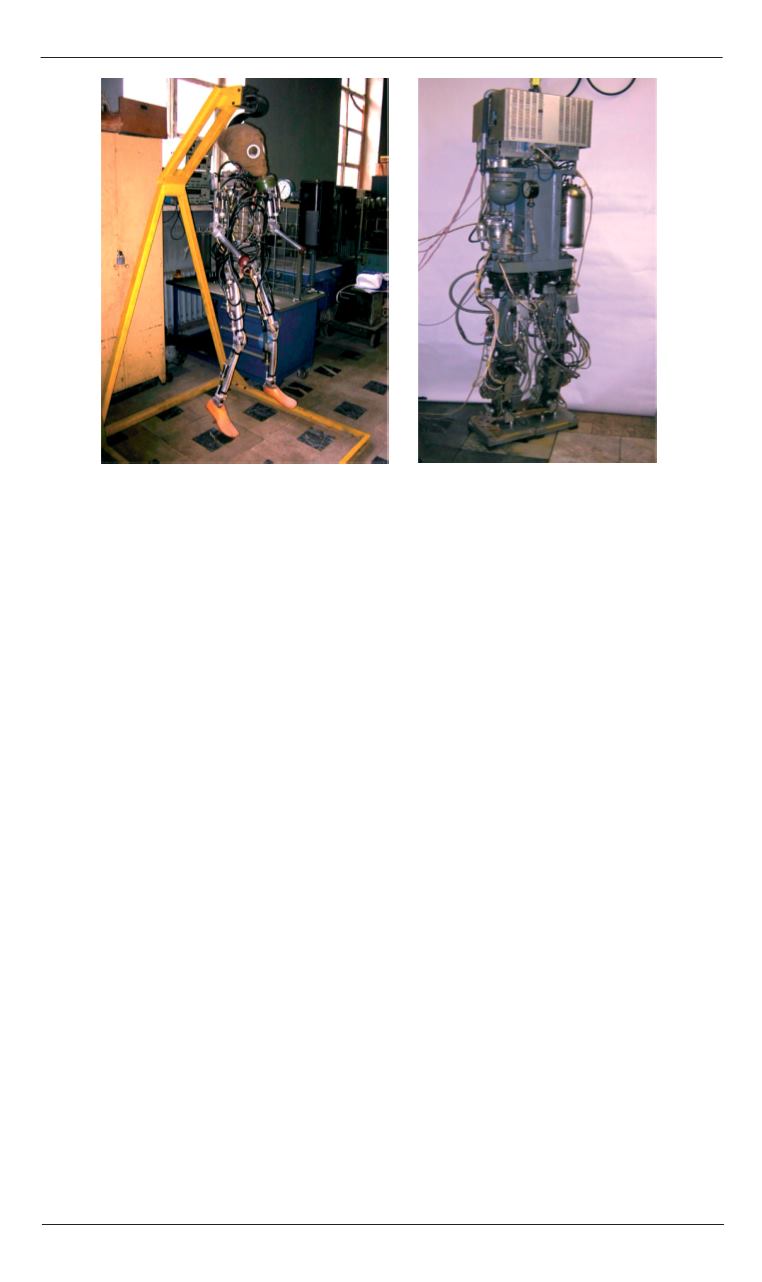
Исполнительный механизм ДШР (2009), разработанный С.Е. Семе-
новым, Д.Б. Кулаковым под руководством А.К. Ковальчука, имеет 12
степеней свободы, оснащен гидравлическими следящими сервоприво-
дами (рис. 8). Высота исполнительного механизма ДШР составляет 2,2 м,
масса 220 кг. В корпусе ДШР размещены насосная станция, аппаратура
системы управления и системы ориентации (см. рис. 8). Энергопитание
осуществляется по кабелю от внешнего источника электроэнергии. Для
управления гидравлическими сервоприводами был разработан про-
граммный комплекс системы управления (на базе операционной систе-
мы QNX), позволяющий распределять вычислительные задачи, реша-
емые в реальном времени, между несколькими ЭВМ, которые связаны
друг с другом компьютерной сетью Ethernet [10].
На ДШР исследовалась работа системы гидравлических сервопри-
водов, установленных на исполнительном механизме робота, с учетом
микрогеометрии золотниковых пар. Была реализована система стаби-
лизации ходьбы по заданной траектории с управлением моментами,
действующими на стопы робота со стороны опорной поверхности; про-
ведены экспериментальные исследования режимов статической и ди-
намической ходьбы ДШР по горизонтальной поверхности [11].
Для замены человека при выполнении работ в открытом космиче-
ском пространстве специалисты фирмы General Motors совместно со
специалистами НАСА создали робот Robonaut-2 (рис. 9,
а
).
а б
Рис. 7.
Роботизированный манекен (
а
) и ДШР (
б
), разработан-
ные в МГТУ им. Н.Э. Баумана


