2
Б.Б. Кулаков, Д.Б. Кулаков, В.В. Беляев
Антропоморфные ДШР предназначены для работы в среде, при-
способленной для человека (здания и сооружения, которые проектиро-
вались под параметры человека; кабины управления уже созданных
машин). Такие ДШР могут работать со всеми видами существующих
инструментов и устройств, используя органы управления, приспосо-
бленные для людей. Недавние события на АЭС «Фукусима» показали
необходимость в этих роботах для ликвидации последствий техноген-
ных катастроф. В настоящее время Управлением перспективных ис-
следовательских проектов Пентагона (DAPRA) объявлен конкурс
(DAPRA robotics challenge) на лучший проект робота, способного за-
менить человека в опасных зонах, в том числе при ликвидации послед-
ствий техногенных аварий и стихийных бедствий. Роботы должны
уметь передвигаться по неровной поверхности, подниматься по лест-
ницам, пользоваться обычным и электрическим инструментом, управ-
лять транспортными средствами.
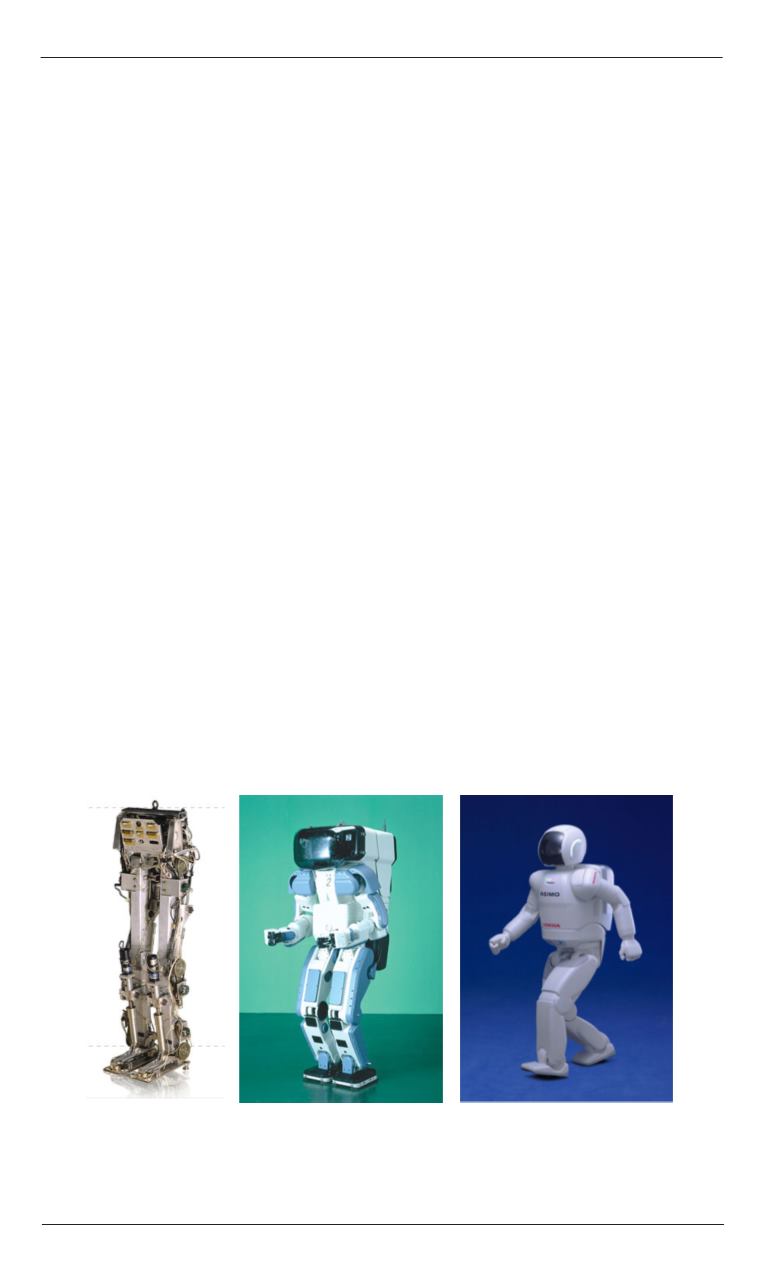
Впервые антропоморфный ДШР был представлен общественности
в 1996 г. фирмой HONDA (рис. 1) [1]. Это был автономный робот модели
Р2, способный передвигаться в режиме динамической ходьбы, подни-
маться и спускаться по лестницам, выполнять простейшие операции
сборки. Однако история развития ДШР фирмы HONDAначалась с робо-
та модели E0, созданного в 1986 г. Он мог передвигаться в режиме ста-
тической ходьбы, выполняя один шаг за 5 с. В 1987 — 1991 гг. прово-
дились исследования ходьбы людей и животных в целях синтезирова-
ния ходьбы робота с большими скоростями, а также формирования
кинематической структуры его исполнительного механизма и располо-
жения сочленений, обеспечивающих требуемую ходьбу робота.
а б в
Рис. 1.
Роботы фирмы HONDA моделей Е0 (1986) (
а
), P2 (1996) (
б
)
и серии ASIMO (2011) (
в
)


