13
Антропоморфные роботы как новая сфера применения гидроприводов
кий КПД гидроприводов ДШР. Потери энергии происходят в основном
вследствие дросселирования рабочей жидкости на кромках золотника
и в первом каскаде гидравлического усиления сервопривода. Поэтому
можно предположить, что развитие шагающих роботов приведет к раз-
витию теории управления гидравлическими сервоприводами не только
с позиции оптимизации по точности и быстродействию, но и по крите-
рию максимальной энергетической эффективности с учетом особен-
ностей работы исполнительных механизмов шагающих роботов.
ЛИТЕРАТУРА
[1] Hirose M., Ogawa K. Honda Humanoid Robots Development.
Philosophical
Transactions of the Royal Society A
, 2007, no 365, pp. 11—19.
[2] Raibert M
.
, Blankespoor K
.
, Nelson G
.
Rob Playter and the BigDog Team, BigDog,
The Rough-Terrain Quadruped Robot.
Proceeding of the 17
th
World Congress
IFAC
, 2008, pp. 10822—10825.
[3] Greenemeier L. Leggy
«
BigDog
»
Robot Set to Step Up for the Military
, Scientific
American, 15 апреля 2008 г. [Электрон. издание].
[4] Aoustin Y., Formal’sky A.M. Control Design for a Biped: Reference Trajectory
Based on Driven Angles as Functions of the Undriven Angle.
Journal of Com-
puter and Systems Sciences International
, 2003, vol. 42, no 4, pp. 645—662.
[5] Chevallereau C., Djoudi D., Formal’sky A. Tracking a Joint Path for the Walk of
an Underactuated Biped.
Robotica, Cambridge University Press,
2004, vol. 22,
no 1, pp. 15—28.
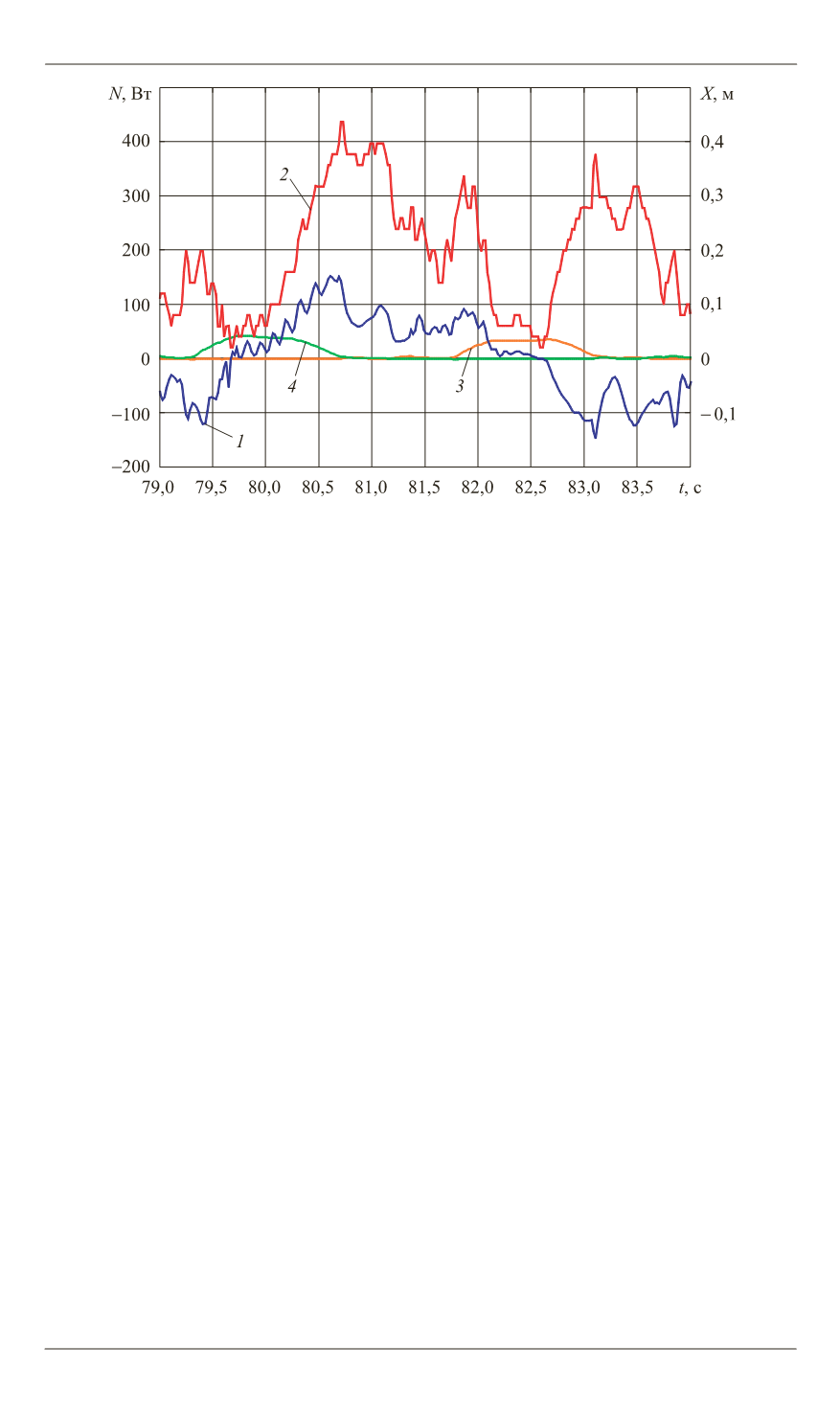
Рис. 12.
Зависимости механической мощности
N
мех
(
1
) привода бедренного
сочленения ДШР и гидравлической мощности потребляемой этим приводом
N
г
(
2
) при ходьбе ДШР по горизонтальной поверхности от времени при вер-
тикальной координате центра правой стопы
Z
12
(
3
) и вертикальной координа-
те центра левой стопы
Z
18
(
4
)


