6
Б.Б. Кулаков, Д.Б. Кулаков, В.В. Беляев
бот разработан в рамках программы DAPRA «Максимум мобильности и
манипуляции». Утверждается, что программа носит фундаментальный
характер и не ориентирована на конкретные военные задачи. Ее цель —
исследования по наращиванию возможностей роботов в целом. Однако
признается, что в ходе выполнения этой программы используемые тех-
нологии могут иметь широкий диапазон военного применения.
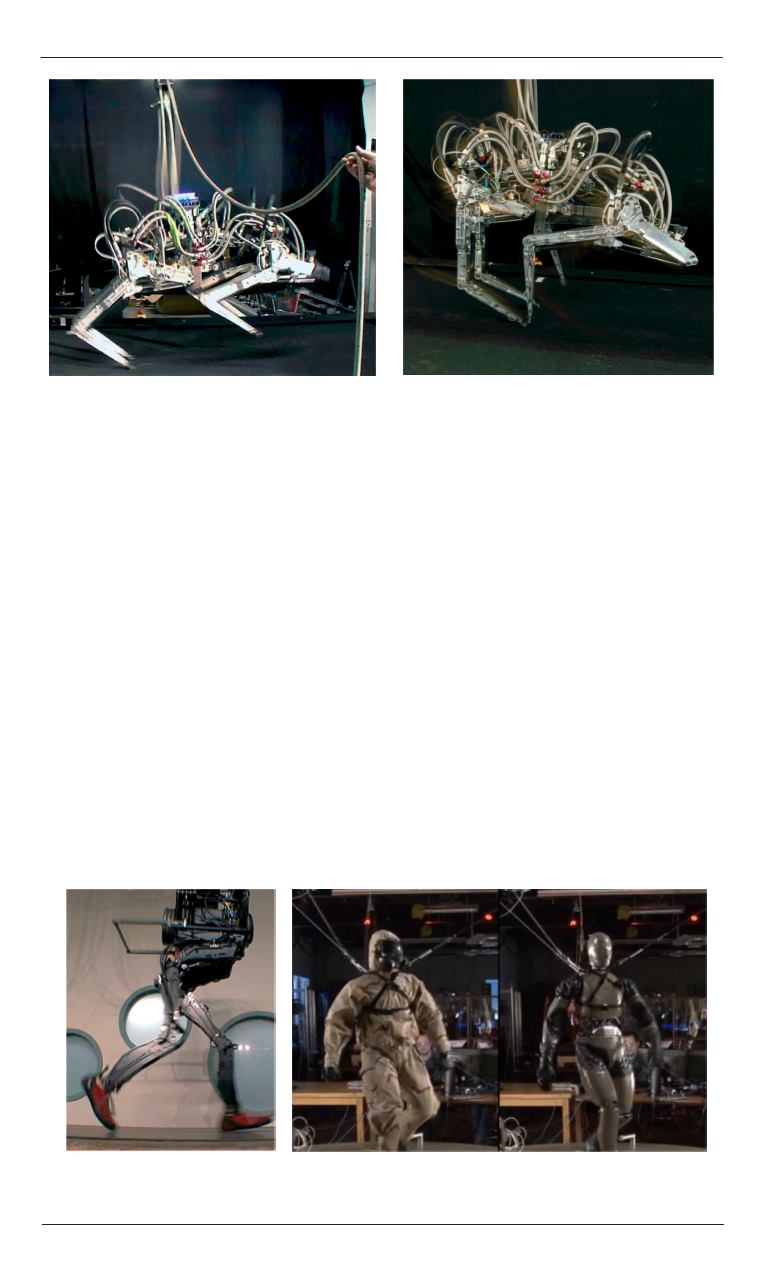
В 2009 г. был представлен двуногий робот Petman (рис. 5,
а
). Ноги
и гидроприводы этого робота взяты от робота BigDog. Робот ходит по-
ходкой человека по беговой дорожке со скоростью 5,2 км/ч, устойчив к
внешним силовым воздействиям (в виде сильных боковых толчков,
приводящих к изменению траектории его движения). В марте 2012 г.
были продемонстрированы новые возможности робота Petman. Робот
имел «полноценные» корпус и руки. Скорость его ходьбы возросла до
8 км/ч. В 2013 г. на официальном сайте компании Boston Dynamics
была выложена видеоинформация об очередном варианте робота
Petman (рис. 5,
б
).
Рис. 4.
Робот «Гепард» (2012)
а б
Рис. 5.
Роботы Petman модели 2009 (
а
) и 2013 г. (
б
)


