














 6 / 15
6 / 15

А.А. Стадухин, Р.Д. Песков
6
Инженерный журнал: наука и инновации
# 9·2017
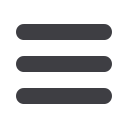
Определение сил взаимодей-
ствия колеса и опорной поверх-
ности.
В рамках данной статьи
полагаем, что на колесо со сторо-
ны ОП действуют две реакции,
имеющие различное направление
и происхождение: нормальная
n
F
и касательная
t
F
(рис. 5).
Нормальная реакция
n
F
обу-
словлена упругими и демпфиру-
ющими свойствами колеса (и ОП)
и направлена по кратчайшему
расстоянию от ОП до центра колеса, т. е. противоположно вектору
р
.
n
Если точные характеристики упругости колеса неизвестны, то их
в первом приближении можно считать линейными, а коэффициент
упругости
u
k
подбирать по желаемому статическому прогибу
ст
к
.
Ко-
эффициент демпфирования в этом случае можно назначить равным
0,1 .
d
u
k
k
Тогда нормальная реакция определяется как
к
к
,
n u
d
F k
k
р
,
n
n
F F n
где
к
— скорость прогиба колеса.
Скорость прогиба колеса
к
в данном случае не следует опреде-
лять простым численным дифференцированием по времени прогиба
к
,
поскольку изменение прогиба по сравнению с предыдущим ша-
гом моделирования может быть вызвано не перемещением колеса,
а резким изменением направления вектора
р
,
n
определяемого алго-
ритмом Гилберта — Джонсона — Керти. Однако можно эффективно
вычислять скорость прогиба как длину проекции
nK
V
вектора скоро-
сти точки контакта колеса
K
V
на вектор
р
n
(см. рис. 2):
к р
.
nK
K
V
n V
Скорость точки контакта колеса
K
V
(рис. 6) складывается из пе-
реносного движения центра колеса
C
V
вместе с корпусом машины
(и движения вдоль направляющего элемента подвески) и относитель-
ной скорости, обусловленной вращением колеса вокруг своей оси.
Рис. 5.
Определение сил взаимодей-
ствия колеса и опорной поверхности