














 5 / 15
5 / 15

Исследование профильной проходимости колесной машины…
Инженерный журнал: наука и инновации
# 9·2017 5
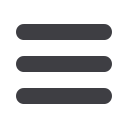
Рис. 3.
Формирование вектора расстояния
р
r
от фигуры CSO до начала координат:
а
,
б
,
в
— поиск новых точек;
г
— новые точки найдены, вектор сформирован;
1
— направле-
ние поиска новой точки;
2
— найденная в данном направлении точка;
3
— найденные рас-
стояние и направление
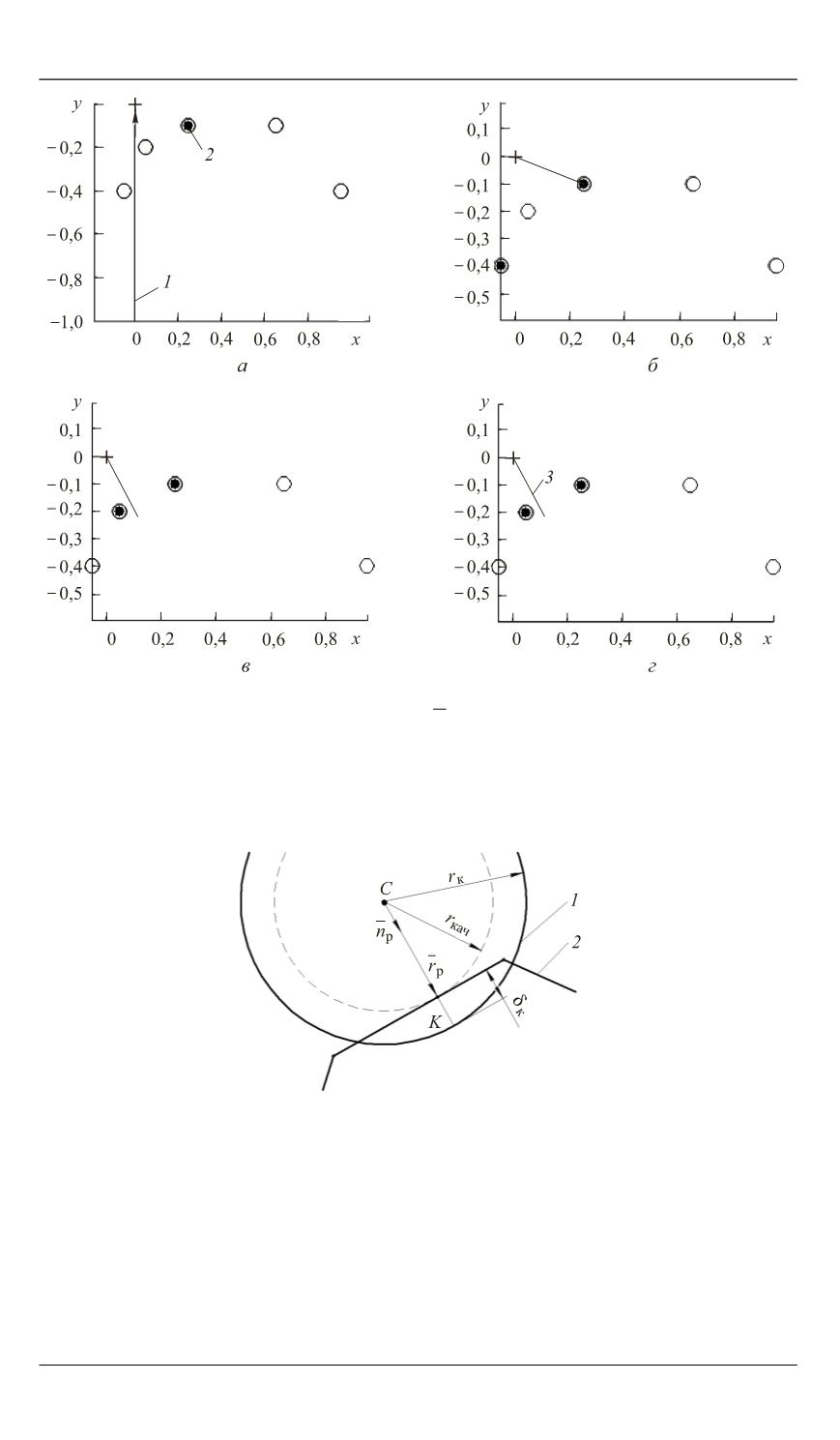
Рис. 4.
Определение направления
и величины деформации колеса:
1
— колесо;
2
— многоугольник опорной
поверхности
Теперь, зная величину и направление деформации колеса, а также
расположение контактной точки, можно расчитать все силы и моменты
взаимодействия колеса и ОП.