














 15 / 20
15 / 20

Проблемы и перспективы развития мобильной робототехники…
15
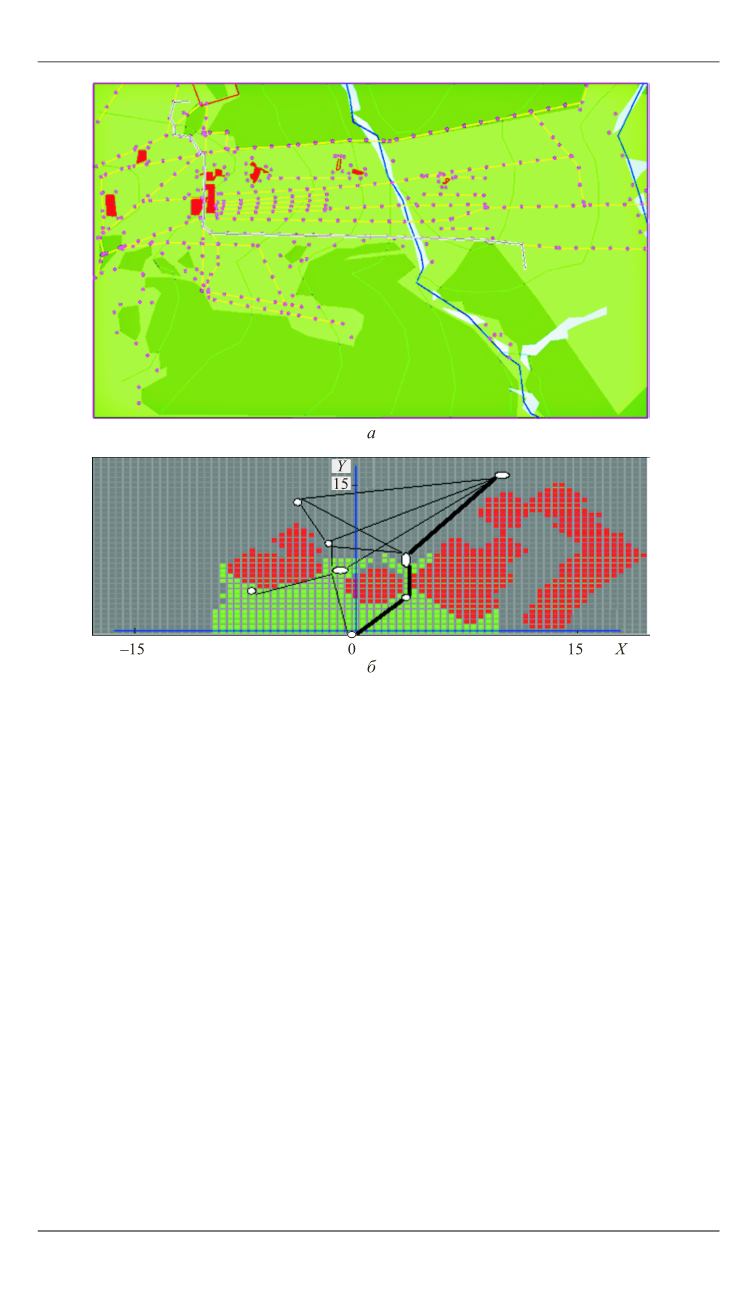
Рис. 11.
Примеры работы СТЗ РТК:
а
— построение глобальной траектории движения РТК;
б
— построение
локальной траектории движения РТК
Одновременно с проектированием перспективных вариантов СТЗ
в МГТУ им. Н.Э. Баумана разрабатываются технологии создания
виртуальной реальности с применением мобильных роботов, осна-
щенных комплексированными СТЗ. В настоящее время они уже поз-
воляют строить визуально подобные объемные модели внешней сре-
ды в реальном времени, которые могут существенно повысить уро-
вень ситуационной осведомленности и эффективность деятельности
операторов дистанционного управления. На рис. 12 приведены ре-
зультаты построения таких моделей на основе комплексирования ви-
део- и лазерно-дальнометрической информации.
Ожидаемые результаты проводимых исследований позволят со-
здать отечественный инновационный научно-технический задел, не-
обходимый для оснащения РТК, находящихся на вооружении Мин-
обороны и силовых ведомств Российской Федерации, для создания
наземных РТК и комплексов с беспилотными летательными аппара-
тами (БЛА) нового поколения, а также высокотехнологичных трена-
жерных комплексов и средств обучения операторов РТК и БЛА раз-
личного назначения.