9
Модернизация мехатронной системы управления радиотелескопом РТ-7.5
Для угломестной оси также наблюдались одночастотные колеба-
ния с частотой 4,9 Гц. На основе имеющихся результатов механиче-
ские системы приводов этих осей аппроксимированы двухмассовыми
упругими моделями с сосредоточенными параметрами. На рис. 9,
а
приведена структурная схема скоростной подсистемы с двухмассовой
моделью механической части подсистемы. Путем структурных пре-
образований схемы, приведенной на рис. 9,
а
, получена удобная для
анализа и расчета схема, представленная на рис. 9,
б
.
Применялась двухэтапная процедура расчета и настройки скорост-
ной подсистемы. На первом этапе осуществляются расчет и настрой-
ка параметров регулятора скорости при отсоединенной нагрузке, т. е.
когда
J
′ = 0 и
M
(
s
) =1 по заданным значениям полосы пропускания
привода по скорости
f
с
и показателя колебательности
М
С
. На основе
анализа асимптотической логарифмической амплитудно-частотной
характеристики (ЛАЧХ) разомкнутого контура скорости были выве-
дены следующие формулы:
2 2
/ 4
1
инт
с дв
K M
J M
M С
С
;
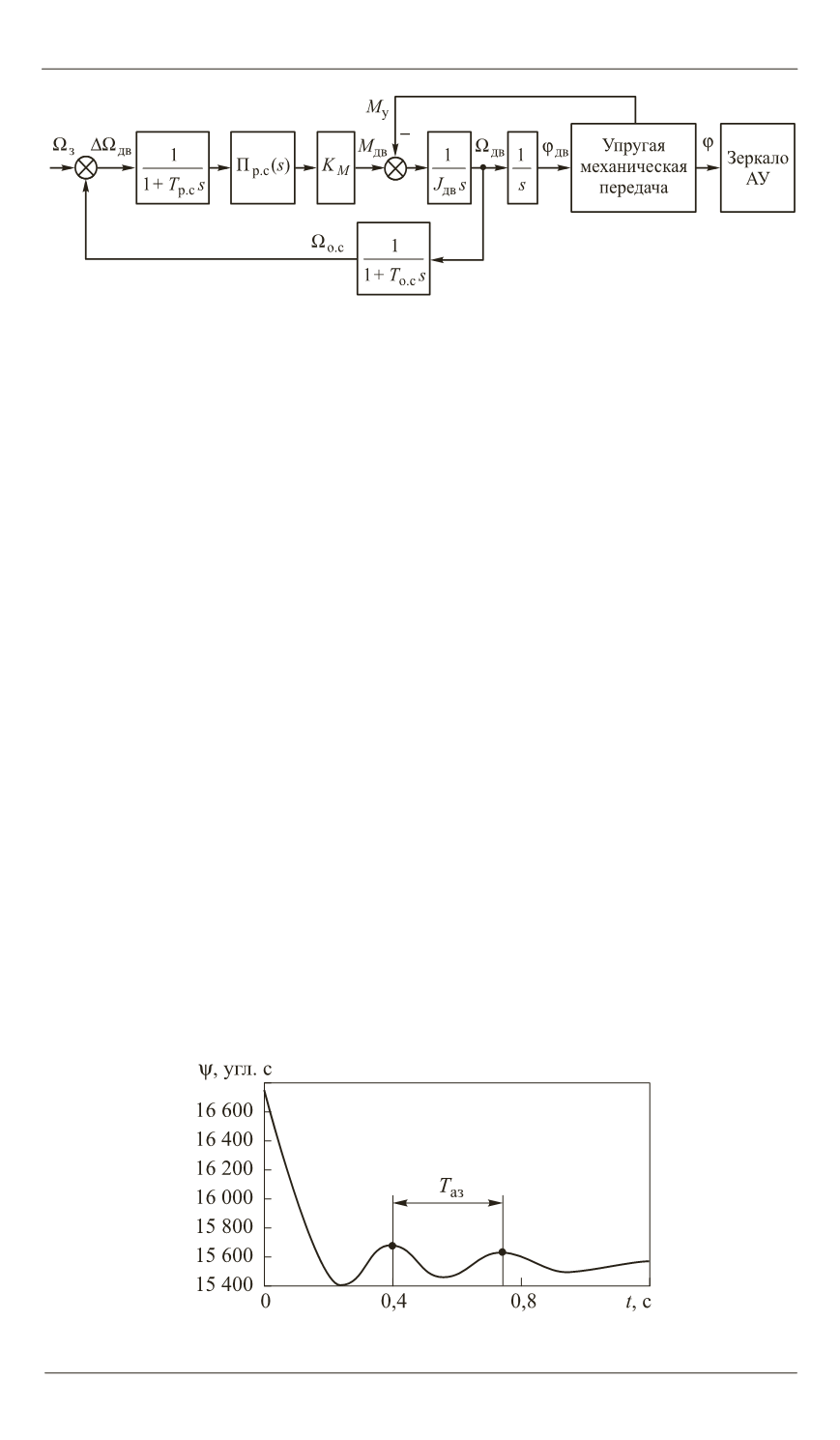
Рис. 7.
Структурная схема системы регулирования скорости на базе ПЧ:
М
у
– момент упругих сил со стороны механической передачи;
K
М
– коэффициент
пропорциональности между электромагнитным моментом и сигналом задания
тока;
J
дв
– момент инерции ротора двигателя; φ
дв
– угол поворота вала двигателя;
Т
р.с
и
Т
о.с
– постоянные времени, учитывающие время реакции регулятора скорости
и фильтрацию сигнала обратной связи; φ
дв
– координата вала двигателя
Рис. 8.
Осциллограмма, полученная для азимутальной оси


