12
В.А. Польский, Ю.И. Рассадкин, А.В. Синицын
1
2
( )
( )
( )
РП0
РП0
РП0
s
s
s
П П П
,
где
2
( ) 1 ( /
) (
/
) /
РП01
п инт
дв
инт
s
K K s K K s s
П
;
2) антирезонансный фильтр с передаточной функцией
1
2 2
02
( )
( ) (1 2
) / (1 )
РП
s N s
Ts T s
s
П
.
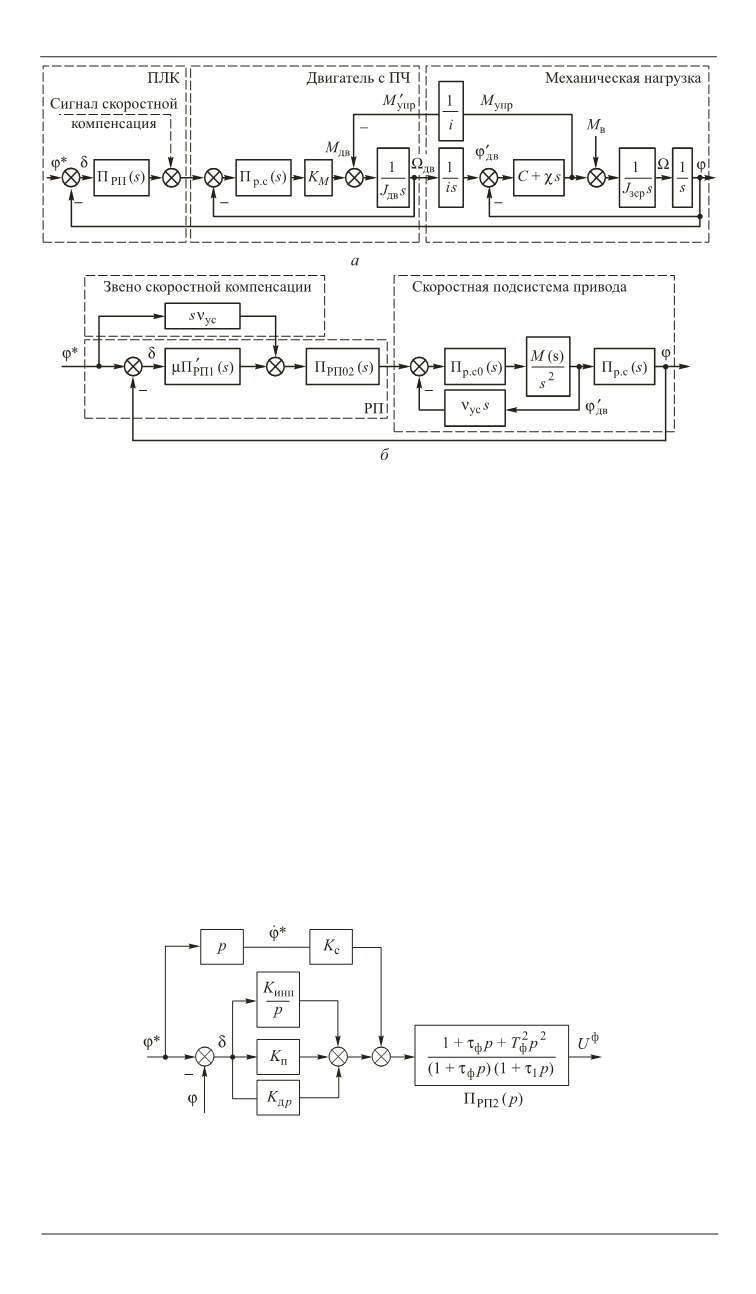
Определенная таким способом структура регулятора имеет вид,
представленный на рис. 12.
Рис. 11.
Линеаризованная (
а
) и преобразованная (
б
) структурные схемы
позиционного контура управления мехатронного модуля угла места:
/ (
)
инт
инт
K K J i
М
– общий коэффициент усиления по контуру положения;
2 2
( ) (1 ) / (1 2
)
N s
s
T s T s
– передаточная функция механической нагрузки
Рис. 12.
Структурная схема регулятора положения со звеном скоростной
компенсации:
K
с
=
i
– коэффициент передачи сигнала скоростной компенсации; τ
ф
,
Т
ф
, τ
1
– постоянные
времени антирезонансного фильтра;
U
ф
– сигнал на выходе регулятора положения


