6
В.А. Польский, Ю.И. Рассадкин, А.В. Синицын
Погрешность квантования составит
β′
=
mах
[sin(ω
э
(
t
0
+ ∆
t
)) – sin(ω
э
t
0
)] – Ω
mах
∆
t
cos(ω
э
t
0
).
Эта погрешность имеет максимум при φ
*
(
t
) = 90°. Значения
максимальной погрешности квантования в зависимости от шага
квантования приведены ниже:
∆
t
, мс …....
0,1
0,2
0,5
1
2
5
10
100
β
′
mах
, угл. с
–1,8·10
–7
–7,2·10
–7
–4,5·10
–6
–1,8·10
–5
–7,2·10
–5
–0,00045 –0,0018 –0,18
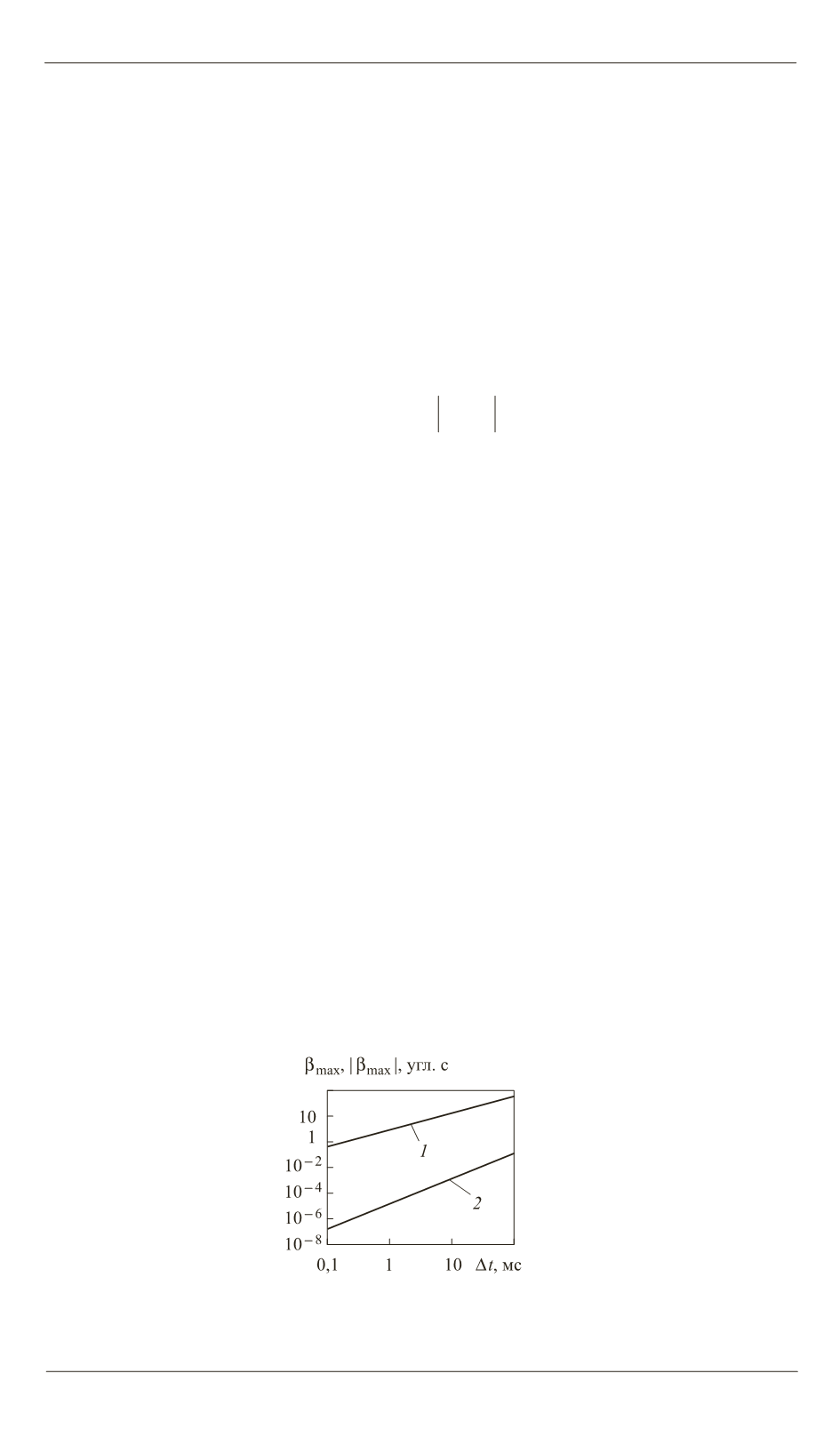
Зависимости |β
mах
| =
f
(∆
t
) и
( )
'
max
f t
, построенные по
указанным выше данным в логарифмическом масштабе, представлены
на рис. 4. Согласно зависимостям, при подаче на вход скоростной под-
системы дополнительного сигнала погрешность квантования даже при
∆
t
= 100 мс не превышает разрешающей способности датчика угла.
В режиме регламентного наведения система управления приводами
должна обеспечить плавное движение антенной установки с ограничени-
ем максимальных скоростей и ускорений. Традиционным является реше-
ние, при котором ограничение скоростей и ускорений достигается за счет
ограничения сигналов на выходах регуляторов положения и скорости
электропривода. Для обеспечения плавного контролируемого перемеще-
ния антенной установки в новое положение принято следующее решение:
в ПЛК программным способом реализуется блок формирования управля-
ющих воздействий, который после приема задания от сервера формирует
плавную траекторию с изменением командной скорости по S-образной
характеристике. Рассчитанные точки траектории подаются на вход следя-
щего привода. В зависимости от начального рассогласования Δφ автома-
тически выбирается одна из четырех траекторий перехода (рис. 5). На
участках кривой 1, 3, 5, 7 командная скорость изменяется по параболиче-
скому закону. Величины Δφ
п1
и Δφ
п2
рассчитываются по формулам
2
1
max
1
max max
2
max 1
/
;
2
.
п
п
t
t
Рис. 4.
Зависимости погрешностей квантования |β
mах
| (1) и |β′
mах
| (
2
) от шага
квантования


