5
Модернизация мехатронной системы управления радиотелескопом РТ-7.5
в виде эквивалентного синусоидального входного воздействия
*
(
t
) =
=
max
sin(ω
э
t
):
2
max
max max
max
max
/
;
/
э
.
Здесь Ω
mах
и ε
mах
– максимальные значения скорости и ускорения. Срав-
нивая два соседних дискретных значения φ*
K
и φ*
K
-1
, можно оценить
погрешность квантования
β(
t
)= φ
mах
[sin(ω
э
(
t
0
+
k∆t
)) – sin(
ω
э
(
t
0
+ (
k
–1)∆
t
))].
Поскольку наибольшая скорость изменения
*(
t
) имеет место при
t
0
= 0 и
k
=1, максимальная погрешность квантования составит
β
mах
(
t
) =φ
mах
sinω
э
∆t
.
Значения максимальной погрешности квантования в зависимости
от шага квантования для Ω
mах
= 9000 угл. с/с и ε
mах
= 36 угл. с/с
2
приведены ниже:
Согласно указанным выше значениям, уже при ∆
t
= 0,2 мс погреш-
ность квантования превышает разрешающую способность 20-разрядного
датчика угла ∆ = 1′′. Для обеспечения заданной точности наведения при
приемлемых для используемых в системе ПЛК значениях ∆
t
(около
1…10 мс) на вход скоростной подсистемы подается дополнительный сиг-
нал, пропорциональный скорости изменения управляющего воздействия,
1
2
0
( )
( )
2 (
),
и
и
t
t
a a t t
или в дискретном виде
1
и
K
a mK
,
K
= 1, …,
n
–1;
m
=
2
a
1
Δ
t
.
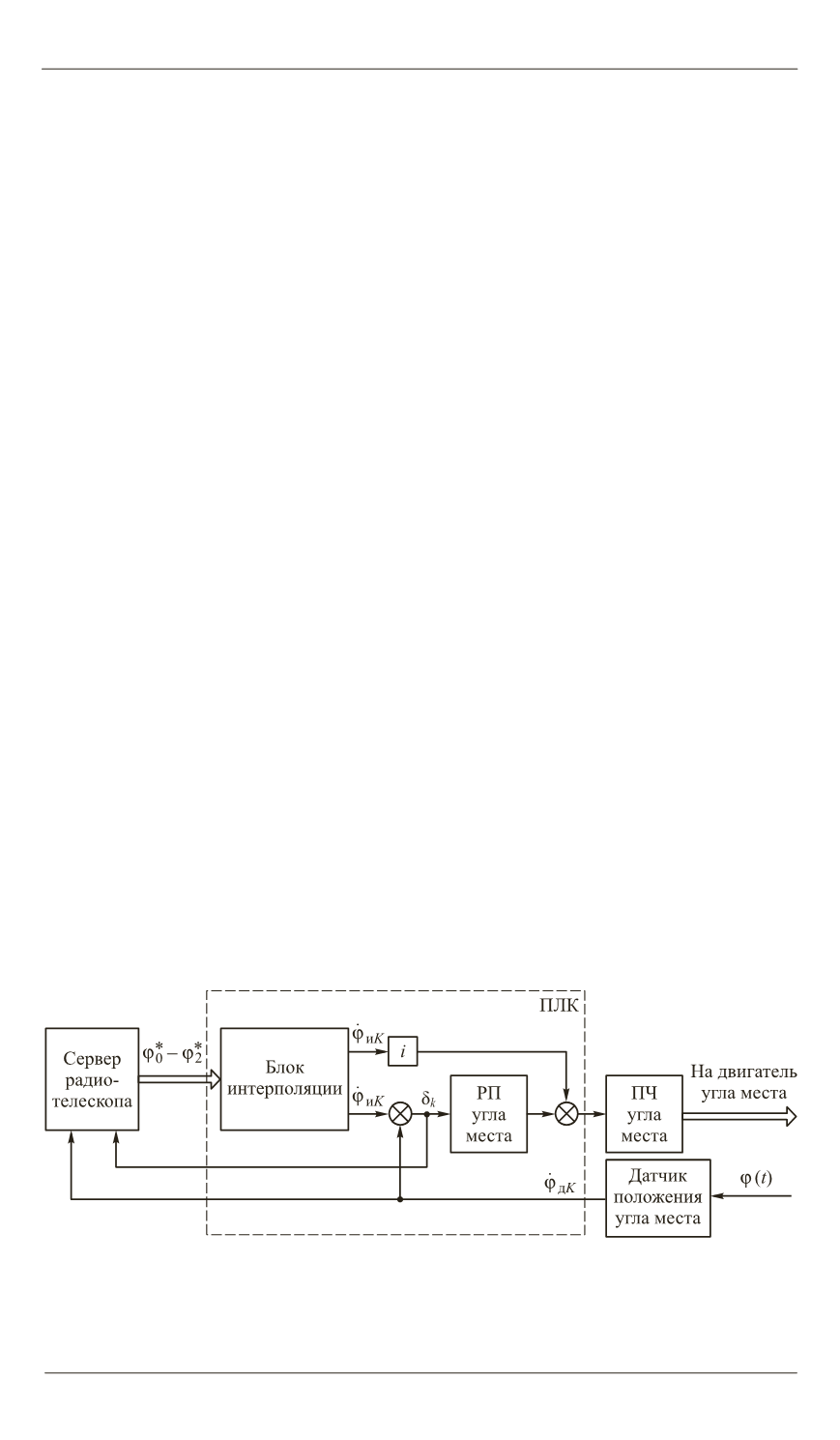
Схема управления приводом угла места в режиме программного
наведения (подачи дополнительного сигнала) приведена на рис. 3.
Рис. 3.
Схема управления приводом угла места в режиме программного на-
ведения:
РП – регулятор положения; δ
k
– ошибка наведения; φ
д
K
– координата оси, измерен-
ная датчиком положения;
i
– передаточное число редуктора
∆
t
, мс ……… 0,1
0,2 0,5 1
2
5
10
β
max, угл. с ….
0,886 1,772 4,43 8,86 17,72 44,3 88,6


