8
В.А. Польский, Ю.И. Рассадкин, А.В. Синицын
Методика расчета и настройки скоростной подсистемы меха-
тронных модулей.
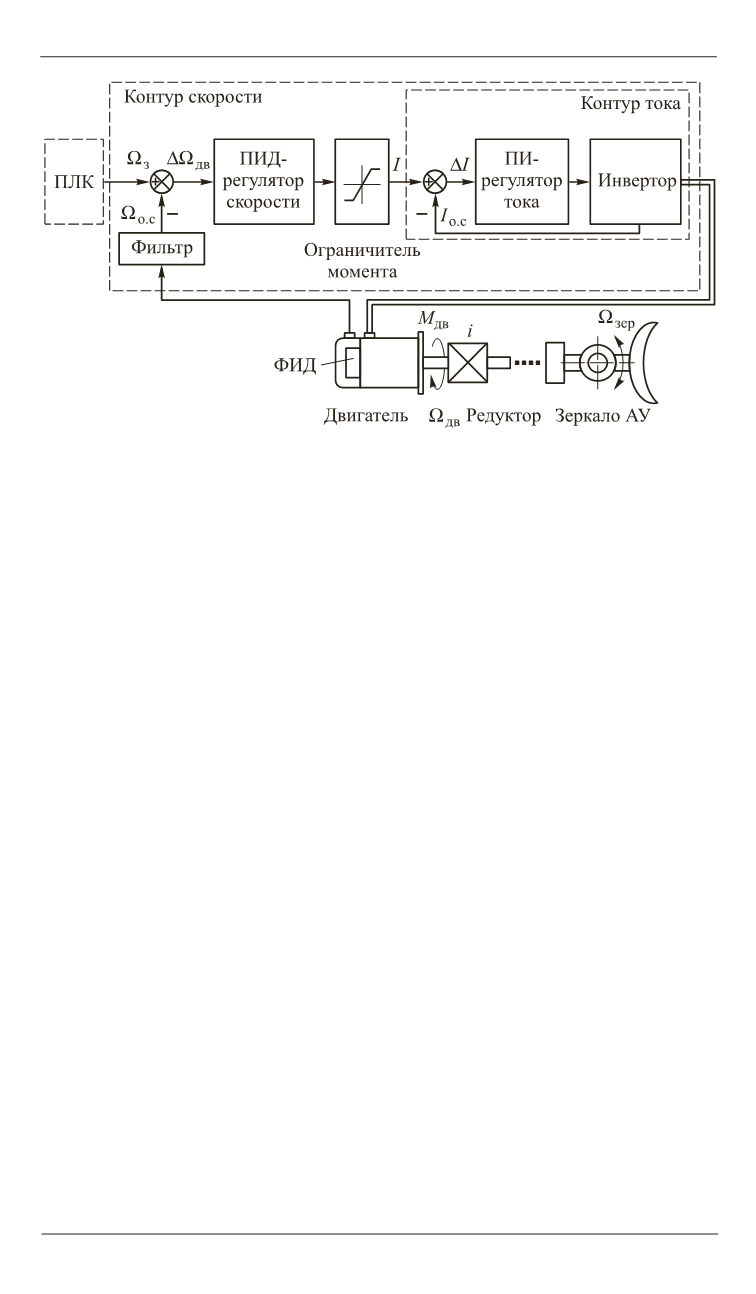
Функциональная схема скоростной подсистемы
приведена на рис. 6.
Передаточная функция ПИД-регулятора скорости имеет вид
1/ (
)
р.с
р
инт
диф
( )
s K
s
s
,
где
K
р
,
инт
,
диф
– настраиваемые параметры регулятора. В рассматрива-
емой подсистеме электромагнитные процессы в регуляторах и асин-
хронных двигателях, в первом приближении, можно принять идентич-
ными подобным процессам в двигателях постоянного тока. С учетом
этого для описания скоростной подсистемы используется структурная
схема, приведенная на рис. 7.
Структура и параметры упругой механической нагрузки были опре-
делены экспериментально. Для этого привод каждой оси резко тормо-
зился до полного останова двигателя. В результате возникали упругие
колебания зеркала, которые фиксировались датчиком положения оси.
В качестве примера на рис. 8 показана осциллограмма, полученная для
азимутальной оси. Согласно рисунку, в механической системе по ази-
мутальной оси наблюдаются одночастотные затухающие колебания
с частотой
f
аз
= 2,69 Гц.
Рис. 6.
Функциональная схема скоростной подсистемы на базе
ПЧАВ-100:
ФИД – фотоимпульсный датчик на валу двигателя; АУ – антенная установка;
ПИД-регулятор – пропорционально интегрально-дифференцирующий регулятор;
ПИ-регулятор – пропорционально интегральный регулятор; Ω
з
– заданное значение
скорости ротора двигателя; Ω
о.с
– сигнал обратной связи; ΔΩ – скоростная ошибка
привода; Ω
дв
– скорость ротора двигателя; Ω
зер
– скорость зеркала;
М
дв
– электро-
магнитный момент, развиваемый двигателем;
I
– заданное значение моментообра-
зующего тока двигателя;
I
о.с
– фактическое значение тока, измеренное датчиком
(обратная связь); Δ
I
– сигнал токовой ошибки


