10
В.А. Польский, Ю.И. Рассадкин, А.В. Синицын
(2
/
) 1 2
1 /
;
р
дв с
с о.с
M
C
C
K J f K
f T M M
2
/
диф
о.с с с
M
T J f K
.
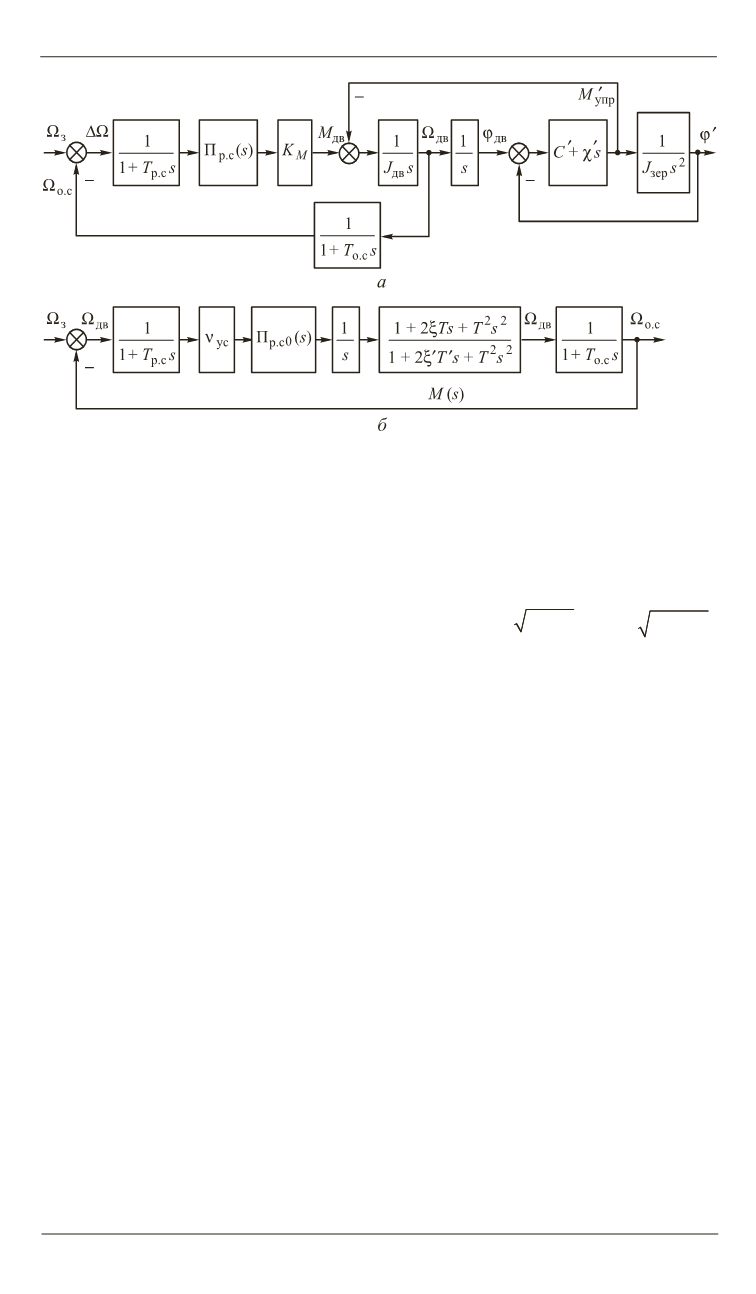
На втором этапе проводится анализ влияния упругой нагрузки на
качество работы привода, для чего в соответствии со структурной
схемой, приведенной на рис. 9,
б
, анализируется ЛАЧХ разомкнутого
контура скорости (рис. 10).
Для того чтобы скоростная подсистема имела приемлемый запас
устойчивости необходимо Δ
А
≥ 6 дБ. Для обеспечения высокой ди-
намической точности слежения применен метод, основанный на
принципах комбинированного управления, а также использован анти-
резонансный фильтр в цепи сигнала ошибки. Линеаризованная струк-
турная схема позиционного контура управления мехатронного моду-
ля угла места приведена на рис. 11,
а
. На этом рисунке математиче-
ская модель скоростной подсистемы представлена без учета малых
Рис. 9.
Структурная схема скоростной подсистемы с двухмассовой моделью
механической части подсистемы (
а
) и расчетная структурная схема этой
подсистемы (
б
):
С
′
, χ
′
– жесткость механической передачи и коэффициент диссипативных потерь,
приведенный к валу двигателя;
J
′
зер
– момент инерции зеркала, приведенный
к валу двигателя; φ
′
,
М
′
упр
– приведенные к валу двигателя координата зеркала
и момент упругих сил; ν
ус
– общий коэффициент усиления;
J
Σ
= J
дв
+ J
′
зер
–
суммарный момент инерции всех движущихся частей;
'
'
/
T J C
,
'
/
дв
T T J J
,
/ (2 );
T
'
'
/ (2 )
T
– постоянные времени и коэффициенты затухания
упругой передачи; τ = χ′
/
С′ – постоянная времени диссипативных потерь;
2
(1
) /
р.с0
р инт
инт диф
( )
s
K s
s s
– передаточная функция регулятора скорости с
единичным коэффициентом усиления


