В.А. Марков, С.Н. Девянин, Л.Л. Михальский
10
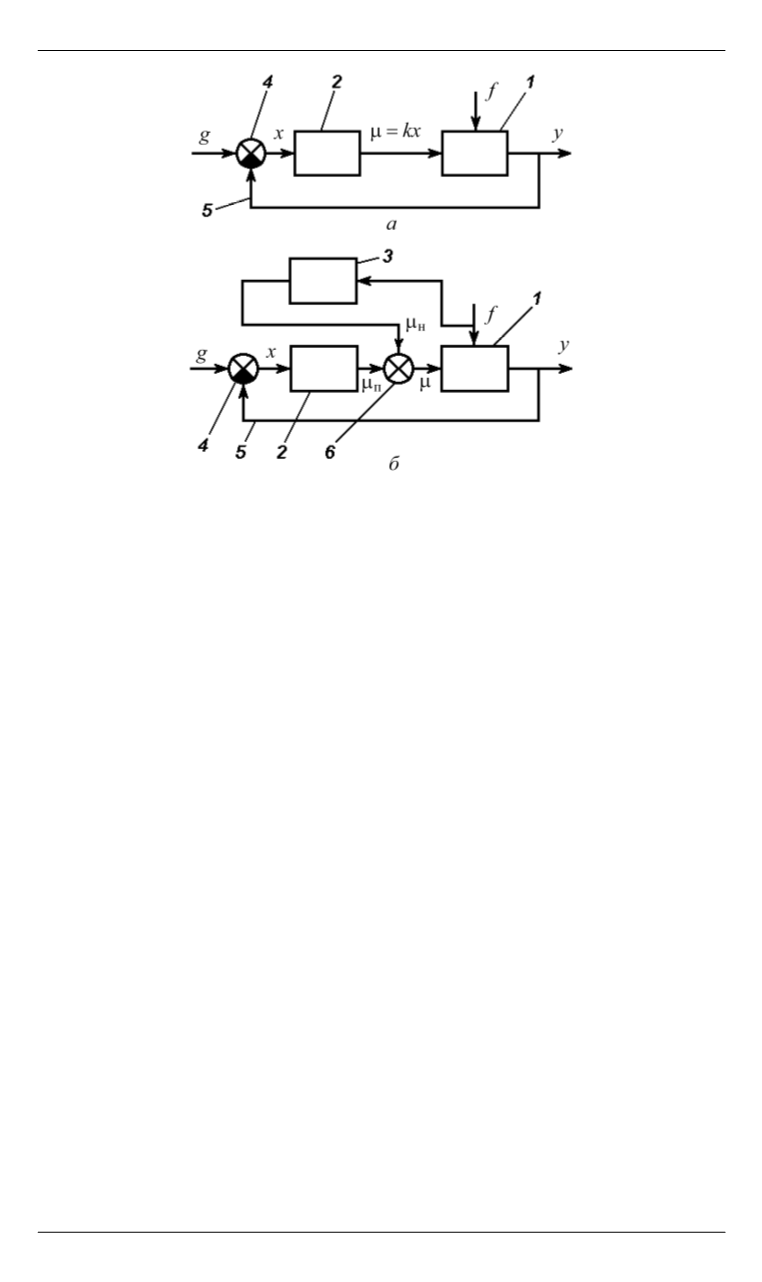
Рис. 4.
Функциональные схемы САР с регулятором, работающим по откло-
нению (
а
), с комбинированным регулятором по отклонению и возмуще-
нию (
б
):
1
— объект регулирования;
2
— пропорциональный регулятор;
3
— регулятор по
нагрузке;
4
— сравнивающий элемент;
5
— линия главной отрицательной обратной
связи;
6
— сумматор
Для поддержания постоянства регулируемого параметра
y
орга-
низуется регулирующее воздействие на соответствующий орган ре-
гулирования объекта. Регулирующее воздействие
μ
(см. рис. 4) в САР
обычно является функцией динамической ошибки
x
, определяемой в
виде отклонения регулируемой величины
y
от ее заданного значе-
ния
g
, т. е.
x
=
g
–
y
. Сигнал ошибки
x
вырабатывается на сравниваю-
щем элементе (сумматоре)
4
(см. рис. 4), на который поступают за-
дающее воздействие
g
и через линию
5
главной отрицательной об-
ратной связи — регулируемый параметр
y
(зачерненный сектор
сумматора
4
означает смену знака сигнала
y
). При этом образуется
замкнутый контур регулирования и САР становится замкнутой
(рис. 4,
а
). Такой принцип работы САР называют принципом регули-
рования по отклонению регулируемого параметра, или принципом
Ползунова—Уатта.
Работающие по этому принципу САР формируют закон регули-
рования (зависимость между входной и выходной величинами регу-
лятора), называемый пропорциональным (П), или статическим, и вы-
ражающийся зависимостью
μ
=
kx
, где
k
— коэффициент усиления
регулятора. САР, имеющая статическую ошибку
x
ст
, которая обу-
словлена данным внешним воздействием, является статической по
отношению к этому воздействию. Если
x
ст
= 0, то САР называют


