














 3 / 15
3 / 15

Алгоритмы аттестации динамически настраиваемого гироскопа…
Инженерный журнал: наука и инновации
# 10·2017 3
Уравнения установившегося движения ротора ДНГ в СК, связан-
ной с корпусом гироскопа в условиях эксплуатации, когда действуют
постоянное ускорение
= + +
x
y
z
a a a
a i
j
k
и угловая скорость
,
ω
соот-
ношение (1) по осям
х
и
у
имеет следующий вид [8]:
к
н
0
y к
н
0
;
.
+
+ ω + ω −ω + ω = ω
+ + ω + ω + ω + ω = ω
x x
xy y
x
g x
y
x z
x
yx x
y y
x
g y
y z
y
K J K J
а а
а а
K J K J
а
а
а а
(2)
Здесь ω
x
, ω
y
— компоненты угловой скорости корпуса гироскопа; ω
0
x
,
ω
0
y
— постоянные составляющие дрейфа гироскопа; ω
g
, ω
к
— состав-
ляющие дрейфа, пропорциональные первой степени ускорения, вы-
званные смещением центра масс ротора вдоль оси вращения привода
и квадратурными моментами;
K
x
,
K
y
и
K
xy
,
K
yx
— соответственно ос-
новные и перекрестные масштабные коэффициенты датчиков момен-
та;
J
x
,
J
y
— значения измеряемых токов в обмотках датчиков момен-
та; ω
н
— коэффициент неравножесткости подвеса. Поскольку значе-
ние коэффициента неравножесткости весьма мало для реальных
кардановых подвесов ДНГ, то на практике при калибровке на непо-
движном основании его не учитывают, а определяют только при ис-
пытаниях на вибростенде.
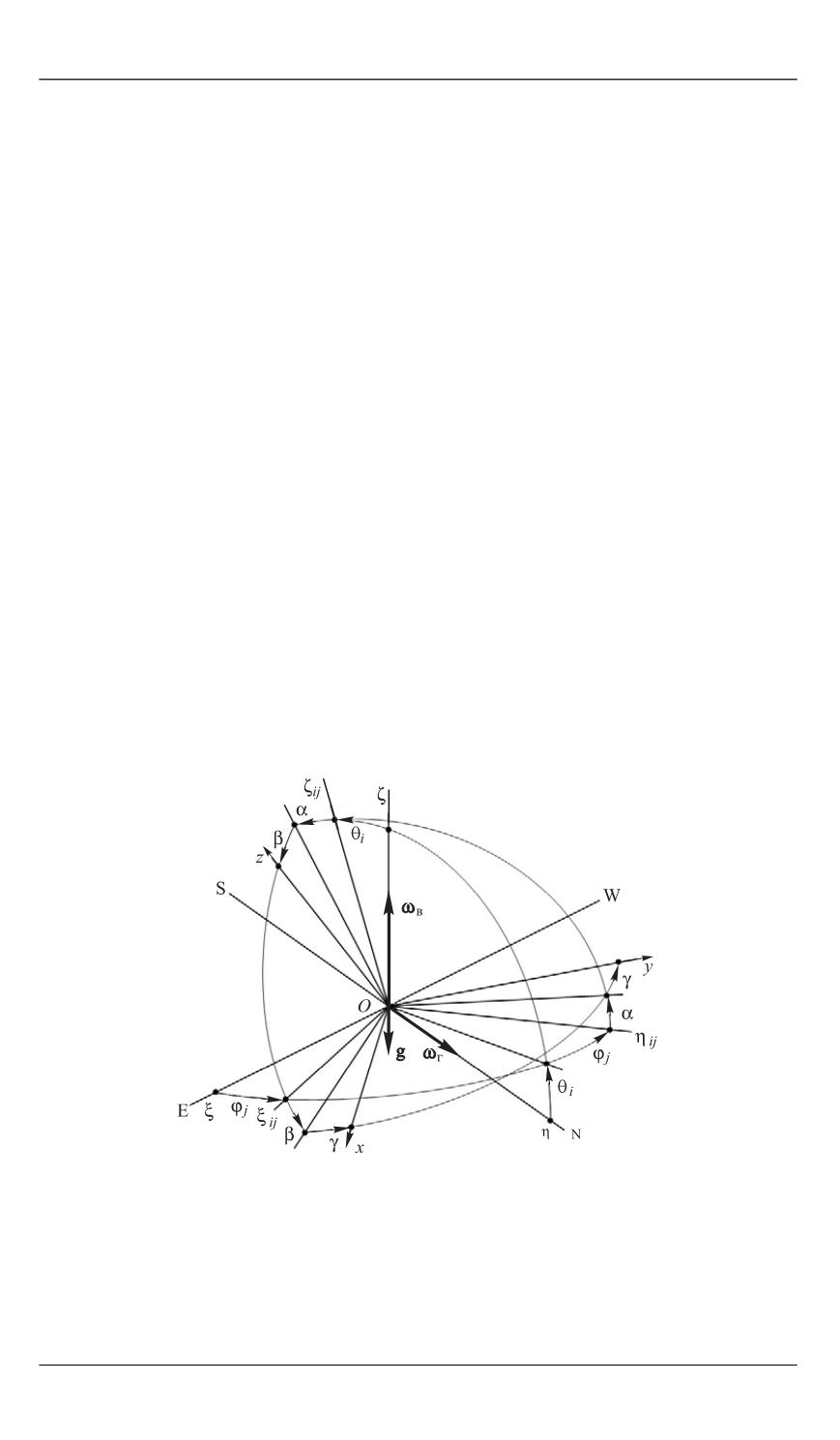
Введем СК (рис. 1) для описания положений гироскопа относи-
тельно географической СК:
Рис. 1.
Системы координат для описания положений гироскопа
ξηζ — географическая СК, совпадающая с базовой системой
координат, связанной с основанием стенда;
(ξηζ)
ij
— СК, связанная с задаваемыми положениями плат-
формы стенда;