














 11 / 15
11 / 15

Алгоритмы аттестации динамически настраиваемого гироскопа…
Инженерный журнал: наука и инновации
# 10·2017 11
Результаты моделирования аналитического метода показывают, что
для любых значений отклонений реальных положений платформы от
задаваемых этот метод позволяет определять параметры ДНГ с высокой
точностью, сопоставимой с точностными характеристиками гироскопа,
полученными при испытаниях на прецизионном поворотном стенде.
Моделирование метода последовательных приближений было
проведено при критериях сходимости Δ
1
= 0,1 % для основных мас-
штабных коэффициентов и Δ
2
= 0,001 град/ч для компонент дрейфа,
зависящих от
g
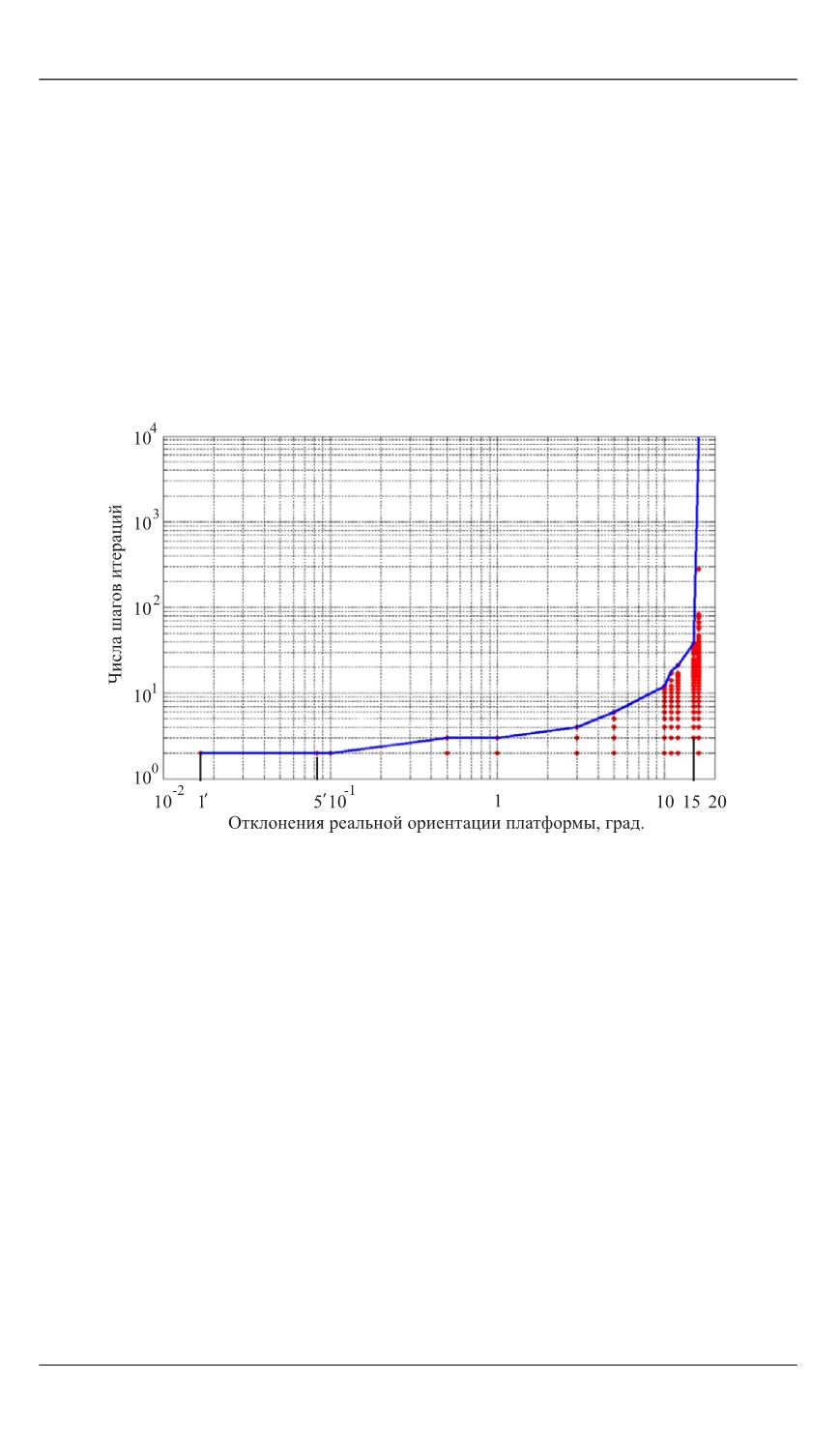
. На рис. 4 представлена зависимость числа итерации
от отклонений ориентации платформы.
Рис. 4.
Зависимость числа итераций от погрешностей ориентации платформы
Кривая на рис. 4 соответствует максимальному числу шагов ите-
рации. Согласно результатам моделирования, данный метод хорошо
работает лишь при отклонениях реальной ориентации платформы от-
носительно базовой СК, не превышающих 15
о
.
Заключение.
Разработана математическая модель собственной
скорости прецессии ДНГ в режиме ДУС при различной ориентации
относительно географической СК с учетом реального положения
платформы относительно базовой СК, связанной с основанием стенда.
Предварительная аттестация отклонений реальной ориентации
платформы относительно базовой СК на заводе-изготовителе соот-
ветствует паспортизации матриц Δ,
B
и
C
в уравнениях (13) и (15),
что упрощает процедуру поверки прецизионных гироскопов и не
требует прецизионных и дорогих поворотных стендов.
Разработаны алгоритмы аналитического и итерационного мето-
дов определения параметров гироскопа. По результатам их числен-