














 16 / 24
16 / 24

Е.С. Гордиенко
16
Инженерный журнал: наука и инновации
# 9·2017
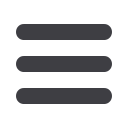
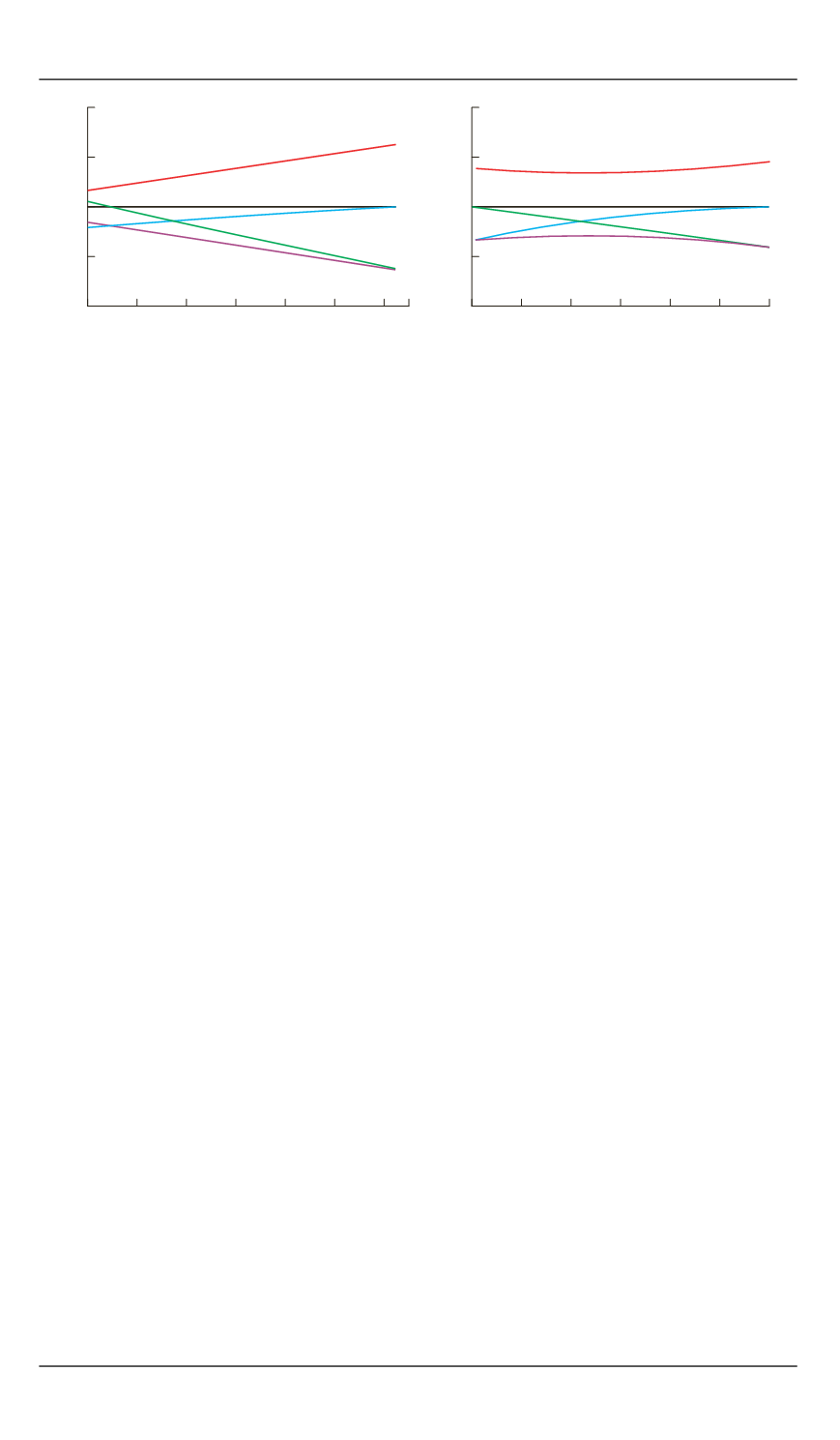
Рис. 4.
Основные углы ориентации тяги вдоль
третьего
маневра:
а —
при управлении по углу γ;
б —
при управлении по углу
На рис. 2–4 представлены зависимости углов тангажа γ (красный
цвет), атаки α (зеленый цвет), угла наклона вектора тяги
(сирене-
вый) к трансверсали
n
° и угла наклона вектора скорости
(синий)
к трансверсали
n
° (см. рис. 1). Некоторые зависимости смещены на
определенный угол для большей наглядности:
на рис. 2 γ – 90°,
+ 180°;
на рис. 3 γ – 90°;
на рис. 4 γ – 270°, α – 180°,
–180°.
Была также проведена оптимизация «трехимпульсного» перехода
с помощью квазиньютоновского метода Пауэлла при задании ориен-
тации тяги по углу атаки α, когда α
01
= 180°, α
01
= 0 °/с, α
02
= 0°, α
02
=
= 0 °/с,
α
03
= 180°, α
03
=0 °/с (
управление № 3в
). Анализ показал схо-
жие результаты. Угловые зависимости для всех активных участков
представлены на рис. 3, 5, 7.
Сравнение рис. 2,
а
, рис. 3,
а
и рис. 4,
а
с рис. 2,
б
, рис. 3,
б
и
рис. 4,
б
показало, что управление тягой по углу атаки α позволяет
получить угловые зависимости, похожие на управление вектором тя-
ги с помощью угла тангажа γ. Конечная масса КА при управлении по
углу α —
m
f
α
= 1690,6445 кг примерно равна таковой при управлении
по углу γ —
m
f
γ
= 1690,6454 кг.
Оптимальные углы ориентации тяги вследствие действия возму-
щений от гравитационных полей Земли и Солнца показывают харак-
теристики, отличающиеся от апсидального решения. В конце
первого
маневра вектор тяги направлен против скорости (
1
180
). Задание
в качестве начального приближения для линейного закона ориента-
ции тяги в смещенной точке
Р
2
простейшего управления α
02
= 0
,
α
02
= 0 град/с при дальнейшей оптимизации приводит к значениям
α
2
31,173
α
2
–0,3835 град/c, а угол атаки в конце
второго
маневра
составляет α
2
f
18,72
. Таким образом, в точке
Р
2
сообщается суще-
ственная положительная радиальная составляющая скорости ∆
V
r
> 0,
, , град
, , град
1
1
0
0
1
1
0
0
20
20
40
40
60
60
80
80
100
100
t
, с
t
, с
027
027
а
б