














 9 / 13
9 / 13

Общая методология совместного применения операторного и атоматического…
Инженерный журнал: наука и инновации
# 8·2017 9
На Луне в «ночных» кратерах движение лунохода, видимо, по-
требует одновременного применения операторного и автоматическо-
го способов управления движением на основе СТЗ, что объясняется
плохим освещением местности как для операторного, так и для авто-
матического способа управления движением лунохода. При этом
операторный и автоматический способы управления его движением
будут объединены и реализованы в одном программно-аппаратном
комплексе с размещением сегментов этого комплекса на борту луно-
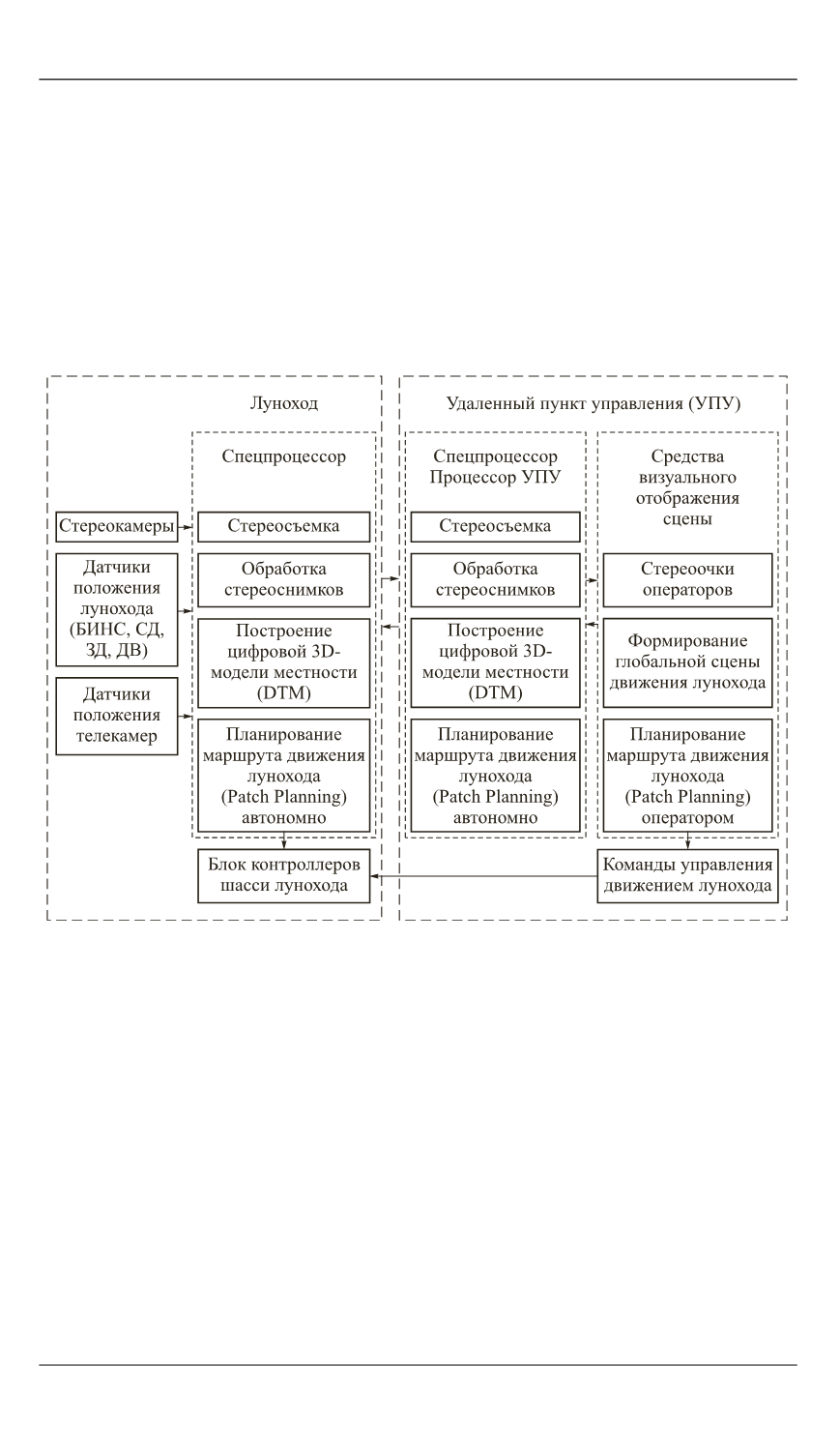
хода и в удаленном пункте управления на Земле (рис. 6).
Рис. 6.
Общая схема автоматического и операторного управления луноходом:
датчики положения лунохода: БИНС — бесплатформенная инерциальная навигационная
система; СД — солнечный датчик (в общем случае); ЗД — звездный датчик; ДВ — датчик
вертикали
На борту лунохода полностью реализована возможность его ав-
тономного движения без участия человека, когда планирование
маршрута и перемещение по маршруту происходит только с помо-
щью собственных аппаратных и программных бортовых средств. Но
при этом операторы также имеют возможность управлять движением
лунохода с удаленного пункта управления в ручном режиме.
В этом случае система технического зрения лунохода будет оказы-
вать помощь оператору, передавая ему данные для построения трех-
мерной сетки поверхности перед луноходом, выдавая рекомендации