














 7 / 13
7 / 13

Общая методология совместного применения операторного и атоматического…
Инженерный журнал: наука и инновации
# 8·2017 7
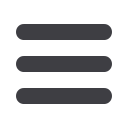
Рис. 5.
Модель автономного планирования маршрута движения лунохода
С помощью этой кинематической модели в бортовом компьютере
моделируется прямолинейное движение планетохода из начальной
точки
T
0
в заданном направлении А на расстояние
L
. Если участок
прямолинейного движения
m
0
оказывается безопасным, то планиро-
вание маршрута продолжается из точки
T
1
.
Если следующий рассчитанный шаг движения
m
1
оказывается
опасным, то рассчитывается шаг
m
2
в другом направлении
.
Если шаг
m
2
также оказывается опасным, то рассчитывается шаг
m
3
. Так про-
должается до тех пор, пока не будет найден безопасный прямолиней-
ный шаг движения. В случае, представленном на рис. 5, таким шагом
оказался шаг
m
3
. Дальнейшая логика планирования маршрута хорошо
видна (см. рис. 5). После окончания планирования маршрута на
участке
T
0
–
T
5
бортовой компьютер дает команду на движение плане-
тохода по этому маршруту.
Достоинством автоматического способа управления движением
лунохода с помощью СТЗ является прежде всего возможность точно-
го количественного измерения формы рельефа перед планетоходом