














 9 / 12
9 / 12

Коррекция углов ориентации в бесплатформенных инерциальных навигационных системах
Инженерный журнал: наука и инновации
# 8·2017 9
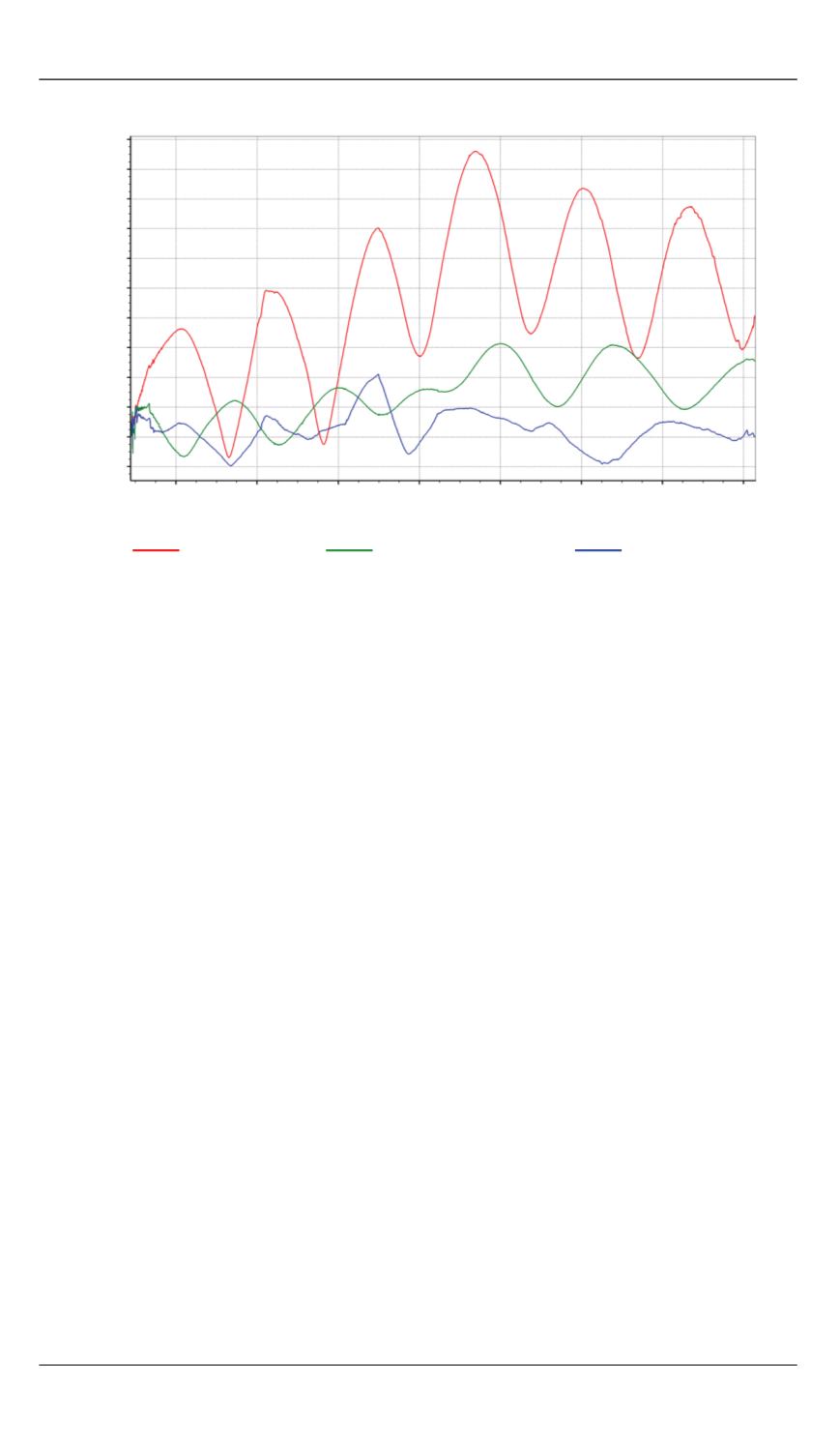
Рис. 5.
Влияние методов коррекции бесплатформенной инерциальной
навигационной системы на угол Ф
Заключение.
Рассмотренные методы позволяют значительно по-
высить точность определения углов ориентации БИНС. Методы об-
ладают противоположными характеристиками. Во-первых, методу 1,
в отличие от метода 2, свойствен длительный переходный процесс,
вызванный алгоритмом фильтра Калмана. Во-вторых, метод 1 позво-
ляет реализовать автономную коррекцию, что невозможно при ис-
пользовании демпфирования. Автономная коррекция осуществляется
благодаря переводу фильтра Калмана в режим прогноза по оконча-
нии переходных процессов.
ЛИТЕРАТУРА
[1]
Терешков В.И.
Методика полунатурных испытаний
корректируемых
бес-
платформенных инерциальных навигационных систем. Дис. … канд. техн.
наук
. Москва, 2011, 133 с.
[2]
Titterton D.H., Weston J.L.
Strapdown Inertial Navigation Technology
. 2
nd
ed.
Stevenage, The Institution of Electrical Engineers, 2004, 581 p.
[3]
Терешков В.М. Полунатурное моделирование датчиков инерциально-
спутниковых навигационных систем
.
Наука и образование
, 2010, № 8.
URL:
http://technomag.bmstu.ru/doc/152269.html(дата обращения 25.11.2016).
[4]
Питтман Д., ред.
Инерциальные системы управления
. Москва, Военное из-
дательство Министерства обороны СССР, 1964, 453 с.
[5]
Salychev O.S.
Applied Inertial Navigation: Problems and Solutions
. Moscow,
BMSTU Press, 2004, 304 p.
5,5
5,0
4,5
4,0
3,5
3,0
2,5
2,0
1,5
1,0
0,5
0
2000 4000 6000 8000 10 000 12 000 14 000 16 000
Время, с
Оценка угла Ф, град
Без коррекции
Компенсация дрейфа
Демпфирование